第十二章简单机械A、基础知识一、杠杆(字体:宋体五号;行间距:单倍行间距)1.定义:____________________________________叫杠杆
说明:①杠杆可直可曲,形状任意
②有些情况下,可将杠杆实际转一下,来帮助确定支点
如:鱼杆、铁锹
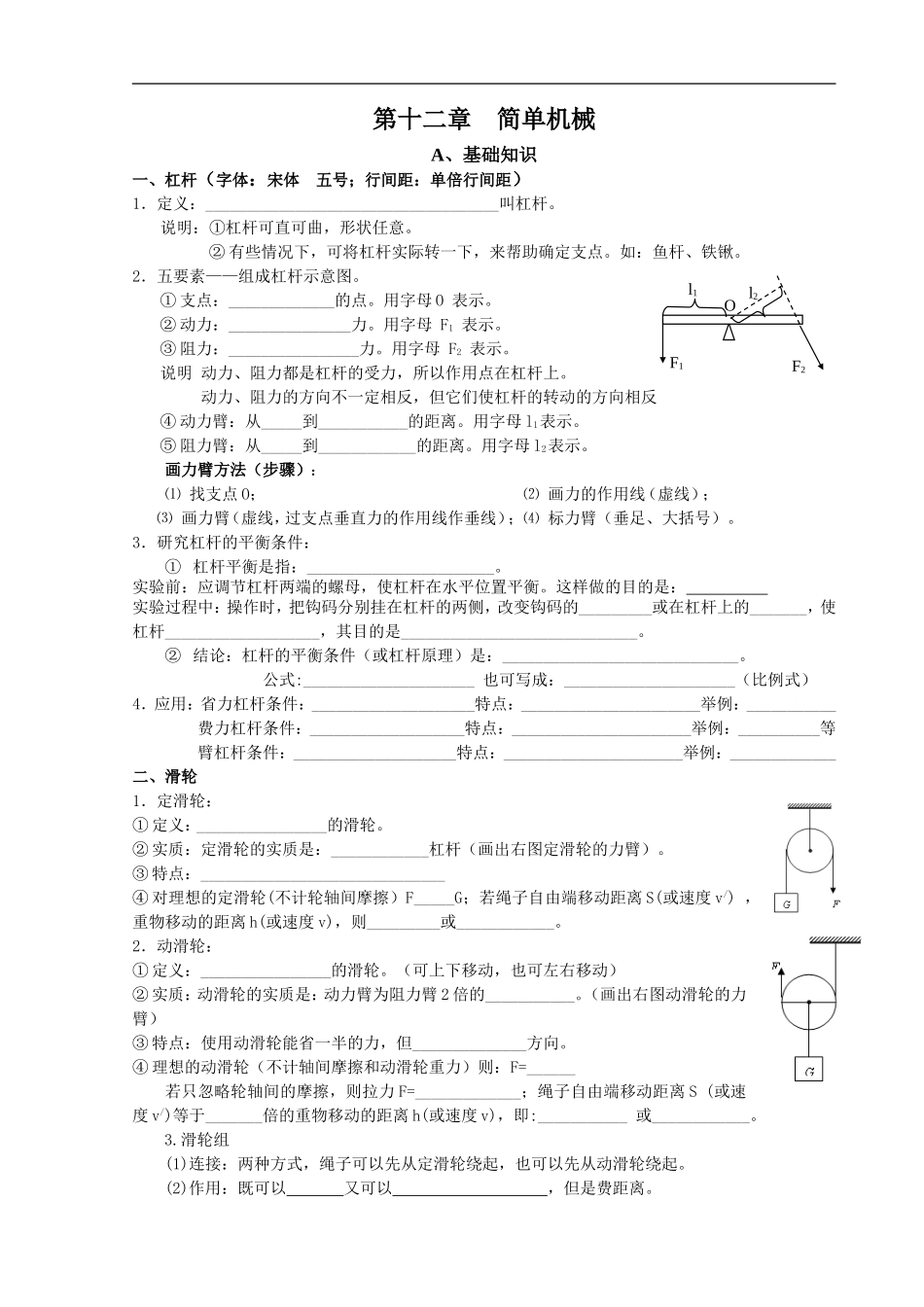
2.五要素——组成杠杆示意图
①支点:_____________的点
用字母O表示
②动力:_______________力
用字母F1表示
③阻力:________________力
用字母F2表示
说明动力、阻力都是杠杆的受力,所以作用点在杠杆上
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反④动力臂:从_____到___________的距离
用字母l1表示
⑤阻力臂:从_____到____________的距离
用字母l2表示
画力臂方法(步骤):⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(垂足、大括号)
3.研究杠杆的平衡条件:①杠杆平衡是指:_______________________
实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡
这样做的目的是:实验过程中:操作时,把钩码分别挂在杠杆的两侧,改变钩码的_________或在杠杆上的_______,使杠杆___________________,其目的是_____________________________
②结论:杠杆的平衡条件(或杠杆原理)是:_____________________________
公式:_____________________也可写成:_____________________(比例式)4.应用:省力杠杆条件:____________________特点:______________________举例:___________费力杠杆条件:___________