智能灌溉系统的研究与设计1毕业设计(论文)题目智能灌溉系统的研究与设计教学点专业年级姓名指导教师定稿日期:2011年6月1日智能灌溉系统的研究与设计2摘要本系统系统通过选择合适的传感器将对土壤中含水量以及空气湿度等重要物理量进行采集,通过信号及采集部分将其转化为数字信号,交给单片机系统进行处理,通过智能控制部分,在需要时驱动相关外设,进行自动精确定位地灌溉
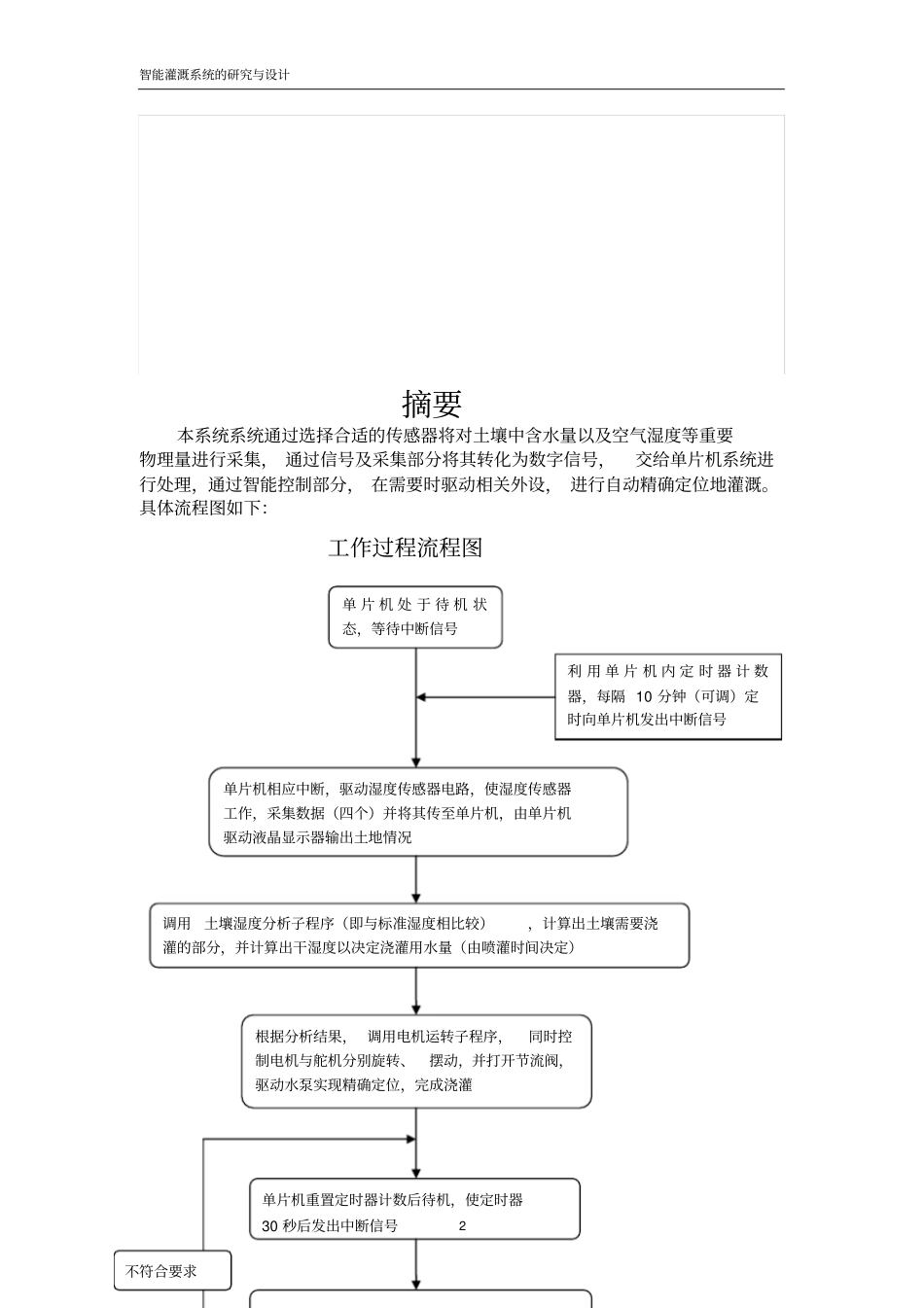
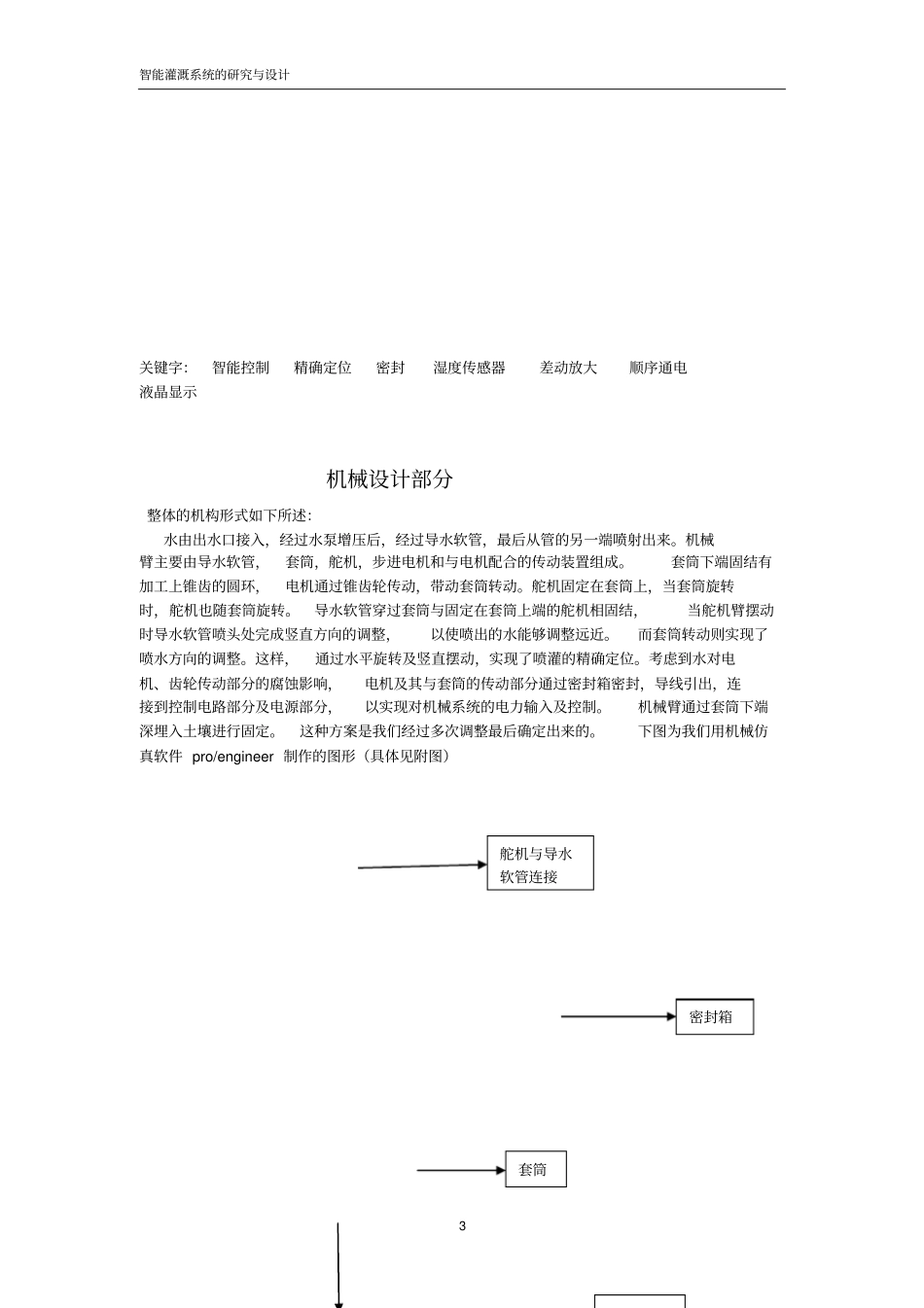
具体流程图如下:工作过程流程图单片机处于待机状态,等待中断信号利用单片机内定时器计数器,每隔10分钟(可调)定时向单片机发出中断信号单片机相应中断,驱动湿度传感器电路,使湿度传感器工作,采集数据(四个)并将其传至单片机,由单片机驱动液晶显示器输出土地情况调用土壤湿度分析子程序(即与标准湿度相比较),计算出土壤需要浇灌的部分,并计算出干湿度以决定浇灌用水量(由喷灌时间决定)根据分析结果,调用电机运转子程序,同时控制电机与舵机分别旋转、摆动,并打开节流阀,驱动水泵实现精确定位,完成浇灌单片机重置定时器计数后待机,使定时器30秒后发出中断信号不符合要求智能灌溉系统的研究与设计3关键字:智能控制精确定位密封湿度传感器差动放大顺序通电液晶显示机械设计部分整体的机构形式如下所述:水由出水口接入,经过水泵增压后,经过导水软管,最后从管的另一端喷射出来
机械臂主要由导水软管,套筒,舵机,步进电机和与电机配合的传动装置组成
套筒下端固结有加工上锥齿的圆环,电机通过锥齿轮传动,带动套筒转动
舵机固定在套筒上,当套筒旋转时,舵机也随套筒旋转
导水软管穿过套筒与固定在套筒上端的舵机相固结,当舵机臂摆动时导水软管喷头处完成竖直方向的调整,以使喷出的水能够调整远近
而套筒转动则实现了喷水方向的调整
这样,通过水平旋转及竖直摆动,实现了喷灌的精确定位
考虑到水对电机、齿轮传动部分的腐蚀影响,电机及其与套筒的传动部分通过密封箱密封,导线引出,连接到控制