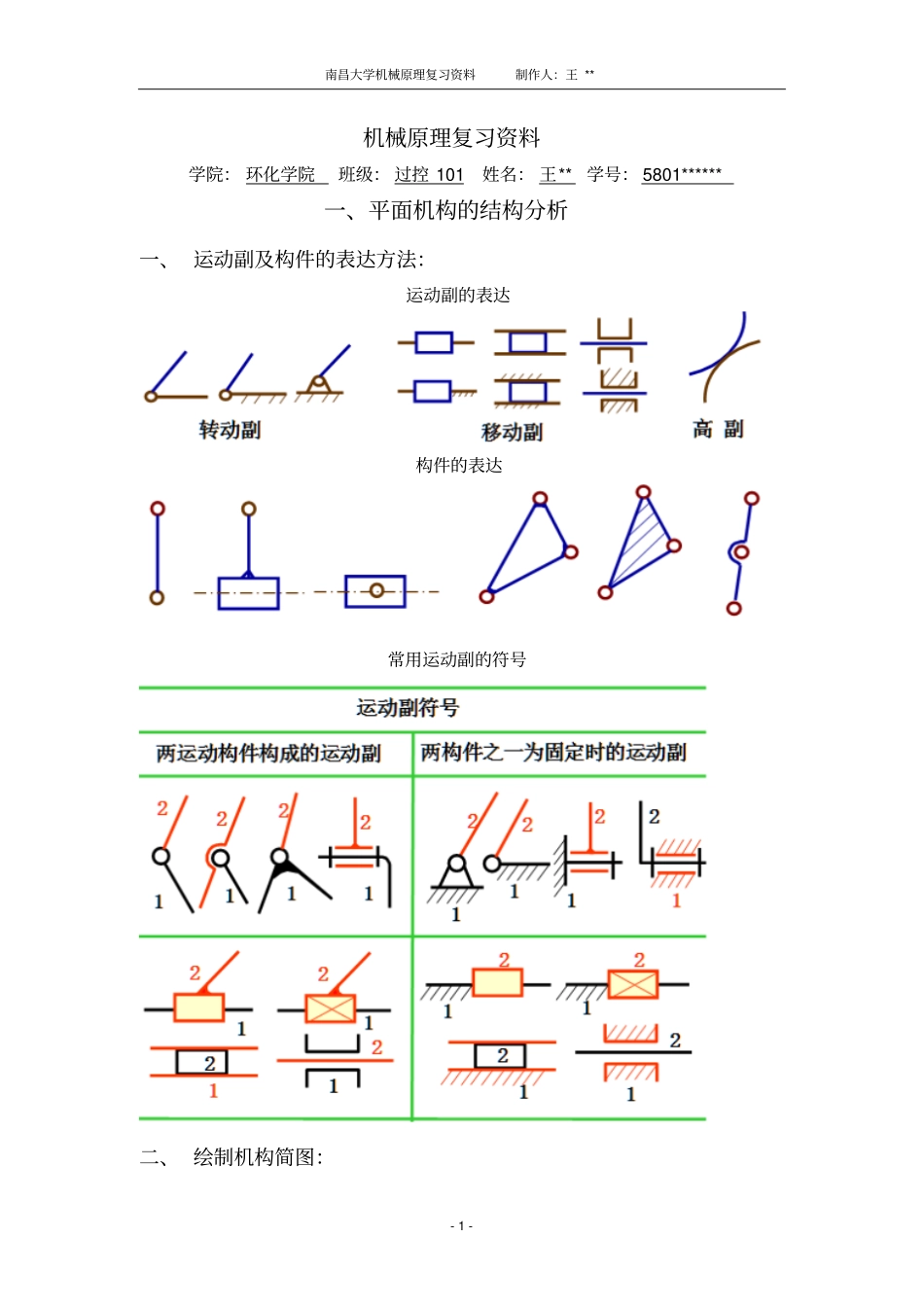
南昌大学机械原理复习资料制作人:王**-1-机械原理复习资料学院:环化学院班级:过控101姓名:王**学号:5801******一、平面机构的结构分析一、运动副及构件的表达方法:运动副的表达构件的表达常用运动副的符号二、绘制机构简图:南昌大学机械原理复习资料制作人:王**-2-1、分析机构,观察相对运动,数清所有构件的数目;2、确定所有运动副的类型和数目;3、选择合理的位置(即能充分反映机构的特性);4、确定比例尺5、用规定的符号和线条绘制成简图
(从原动件开始画))三、计算平面机构自由度:1、机构自由度的计算公式:F=3n-(2PL+PH)2、注意事项:1)、复合铰链:两个以上的构件在同一处以转动副相联计算:m个构件,有m-1转动副复合铰链常出现在下列情况:2、局部自由度F′:构件所具有的与其他构件运动无关的局部运动
注意:计算机构自由度时,应将局部自由度除去不计
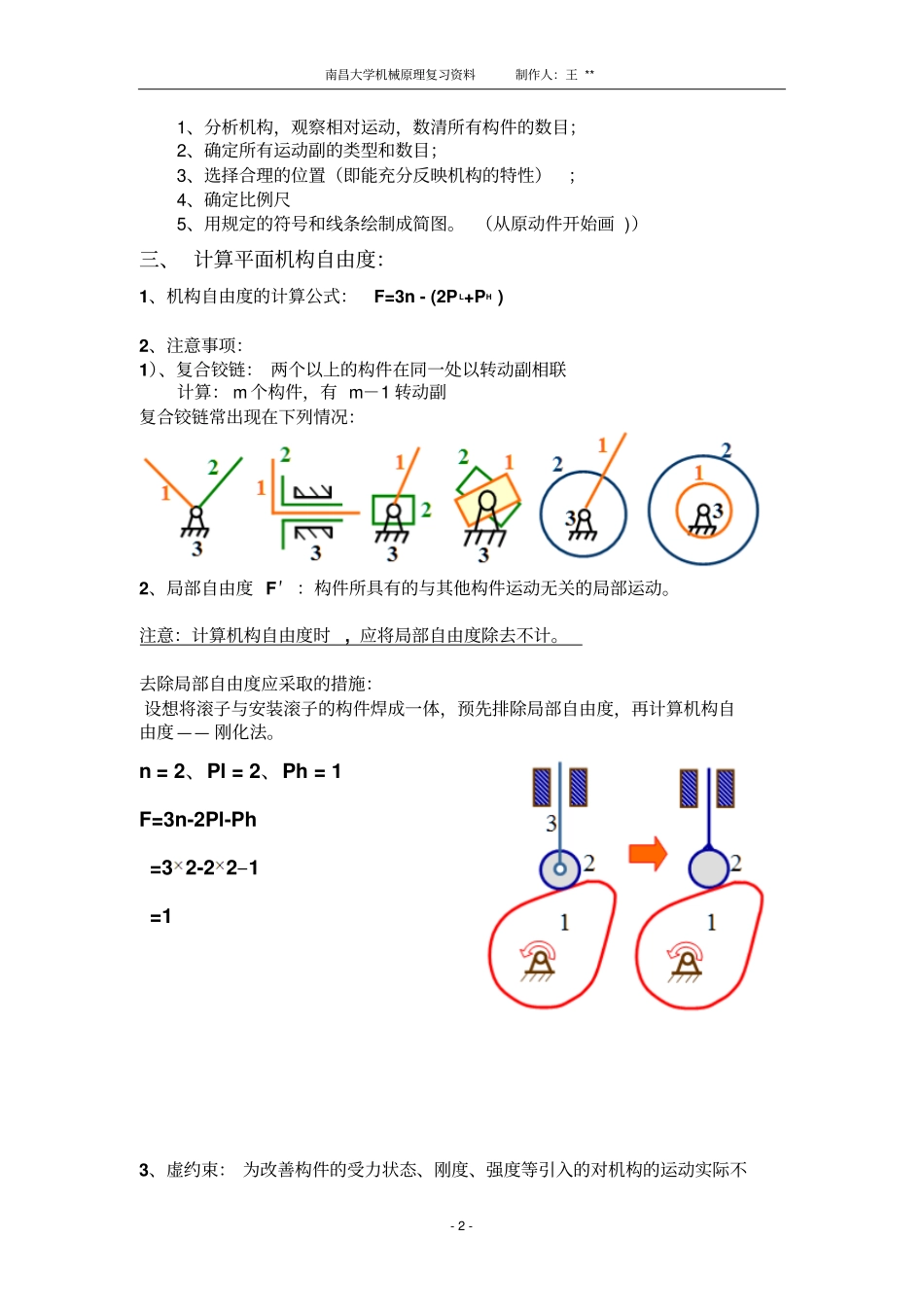
去除局部自由度应采取的措施:设想将滚子与安装滚子的构件焊成一体,预先排除局部自由度,再计算机构自由度——刚化法
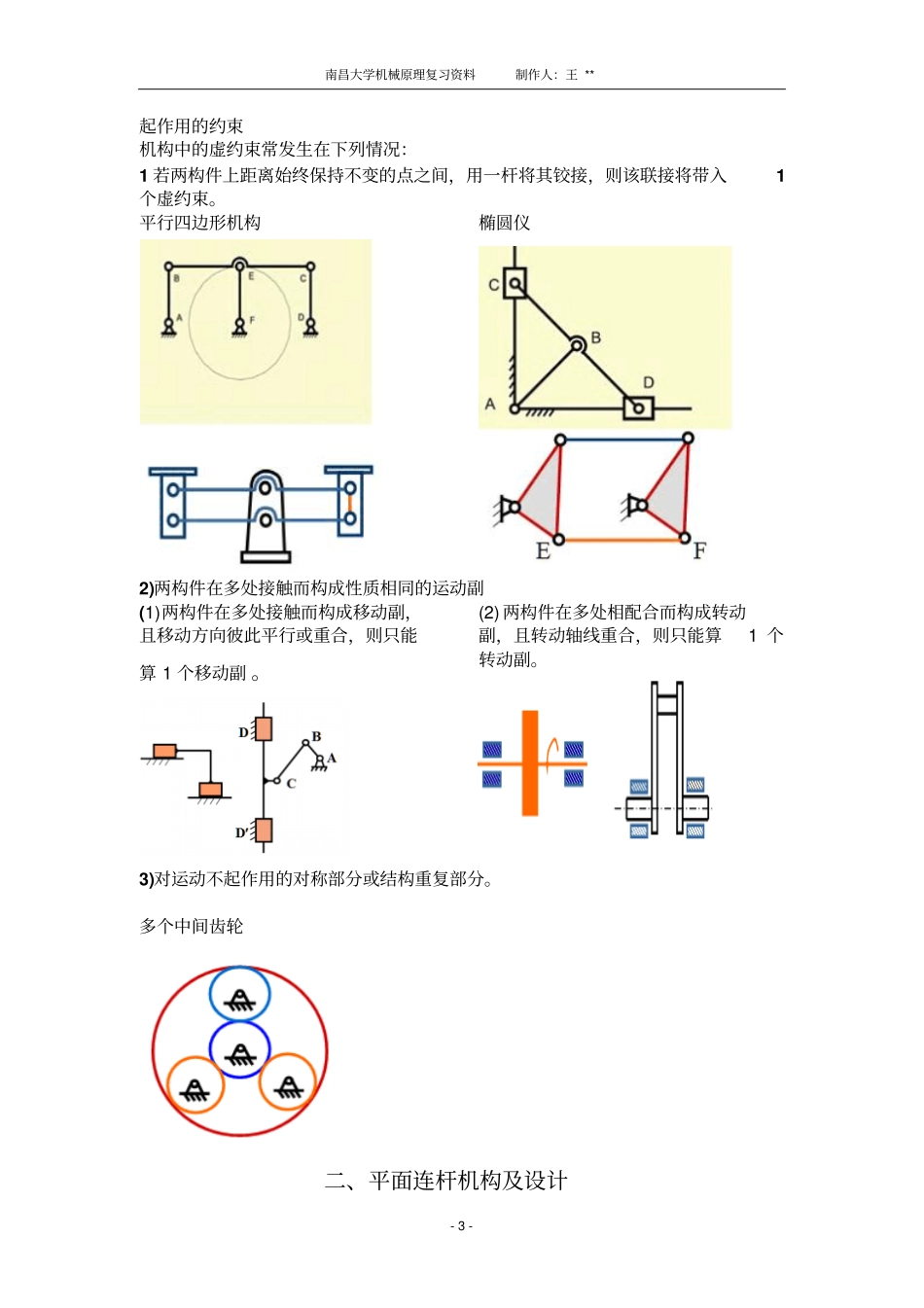
n=2、Pl=2、Ph=1F=3n-2Pl-Ph=32-22–1=13、虚约束:为改善构件的受力状态、刚度、强度等引入的对机构的运动实际不南昌大学机械原理复习资料制作人:王**-3-起作用的约束机构中的虚约束常发生在下列情况:1若两构件上距离始终保持不变的点之间,用一杆将其铰接,则该联接将带入1个虚约束
平行四边形机构椭圆仪2)两构件在多处接触而构成性质相同的运动副(1)两构件在多处接触而构成移动副,且移动方向彼此平行或重合,则只能算1个移动副
(2)两构件在多处相配合而构成转动副,且转动轴线重合,则只能算1个转动副
3)对运动不起作用的对称部分或结构重复部分
多个中间齿轮二、平面连杆机构及设计南昌大学机械原理复习资料制作人:王**-4-一、铰链四杆机构有整转副的条件:1、运动副A成为整转副的条件组成