滁州职业技术学院成人高等教育毕业设计课题:机械手的动作控制设计时间:班级:09级机电一体化(3)班学号:姓名:指导教师:李文萱2011届机电一体化专业(09级机电3班)毕业设计任务书-----机械手动作的控制一、任务描述机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门
械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,有些操作装置需要由人直接操纵
二、设计目的通过本次设计让学生了解一般PLC控制系统设计的过程、设计要求、应完成的工作内容和具体设计方法,同时也是对既往知识的复习、巩固和灵活应用的过程,可以提高学生的整体观,为今后走向工作岗位提供实践经验
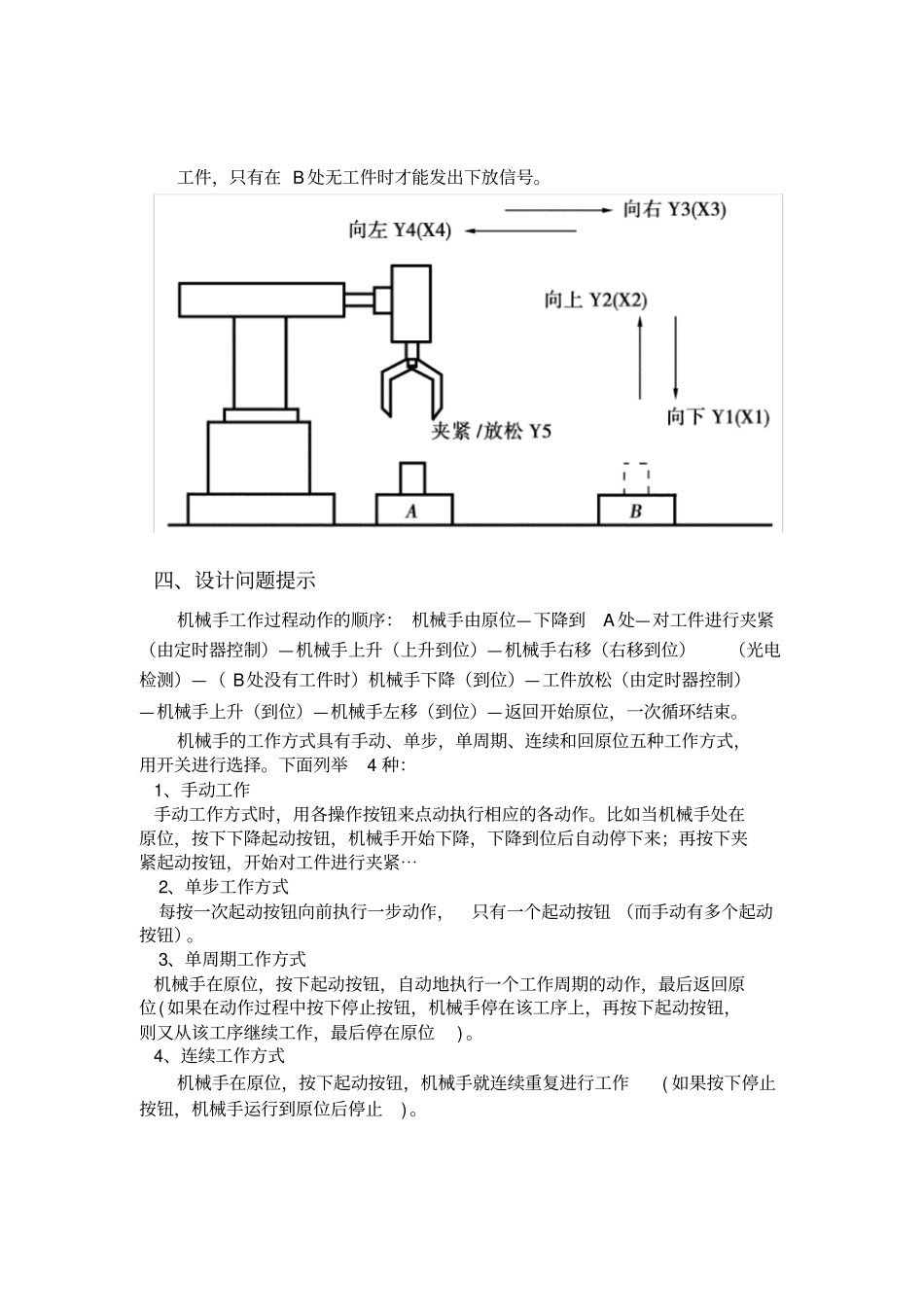
三、控制任务和一般要求示意图中为一个机械手取与放的搬运系统,原点为左上方所达到的极限位置,搬运过程是机械手将工件由A传送到B
分别设计出手动和自动控制的程序
上升和下降,左移和右移的执行均由双线圈二位电磁阀推动气缸来完成
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一但下降的电磁阀线圈通电,机械手下降,即使此时线圈断电,机械手要仍然要保持现有的下降动作状态,直到相反方向的电磁阀线圈通电为止
夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电执行放松动作
设备装有上、下限位和左、右限位开关;夹紧和放松可以由限位开关来实现也可以利用定时器来实现
当工件处于B处上方准备下放时,为确保安全,用光电开关检测B处有无工件,只有在B处无工件时才能发出下放信号
四、设计问题提示机械手工作过程动作的顺序:机械手由原位—下降到A处—对工件进行夹紧(由定时器控制)—机械