机器人电源连接机器人电源连接线DB50串口连接线X11网线黄绿双色地X电源接口机安全接口X11器人数字10口X12控制以太网接口器X20接地螺丝接地螺丝X21示教器smartPA自动化生产线模块实训系统安装与连接(1)机器人电气连接自AC220V电源线XS1操作对-■hPl动2P24V电源线象承载台XXS2化P2DB25串口线XP3生DB25亠串口座XS3产1线2P对插机械手模XP4XS4安装座X5(2)模块安装及与操作台模块电气连接(3)气路安装与连接按可一下步骤进行实训:(1)安装工具和实训模块使用4个M5*12的内六角螺丝将工具固定在机械手第六轴法兰盘上
使用4个M6*16内六角螺丝加垫片将实训模块固定在操作对象承载台上
(2)开启电源,等待机器人系统开机完成;开启气源,调节减压阀的压力到0
5MPa电控柜漏保开关面板电源开按钮,观察示教器等待机器人系统开机完成
将气阀开关打开到与管道平行,并确保空压机电机开启按钮为弹上状态
在空压机停止充气时,观察减压阀压力表,若压力指示过大或过小,拔起减压阀上方盖子,通过旋转盖子进行压力调整
(3)使用锥形教学块辅助进行吸盘工具坐标的测量采用XYZ4点法确定工具的原点,采用ABC世界坐标法确定工具坐标的姿态
案例中吸盘工具坐标名为xipan
(4)使用示教器进行工件基坐标测量使用xipan工具坐标采用3点法测量工件基坐标,案例中自动化生产线模块实训中的基坐标为maduo
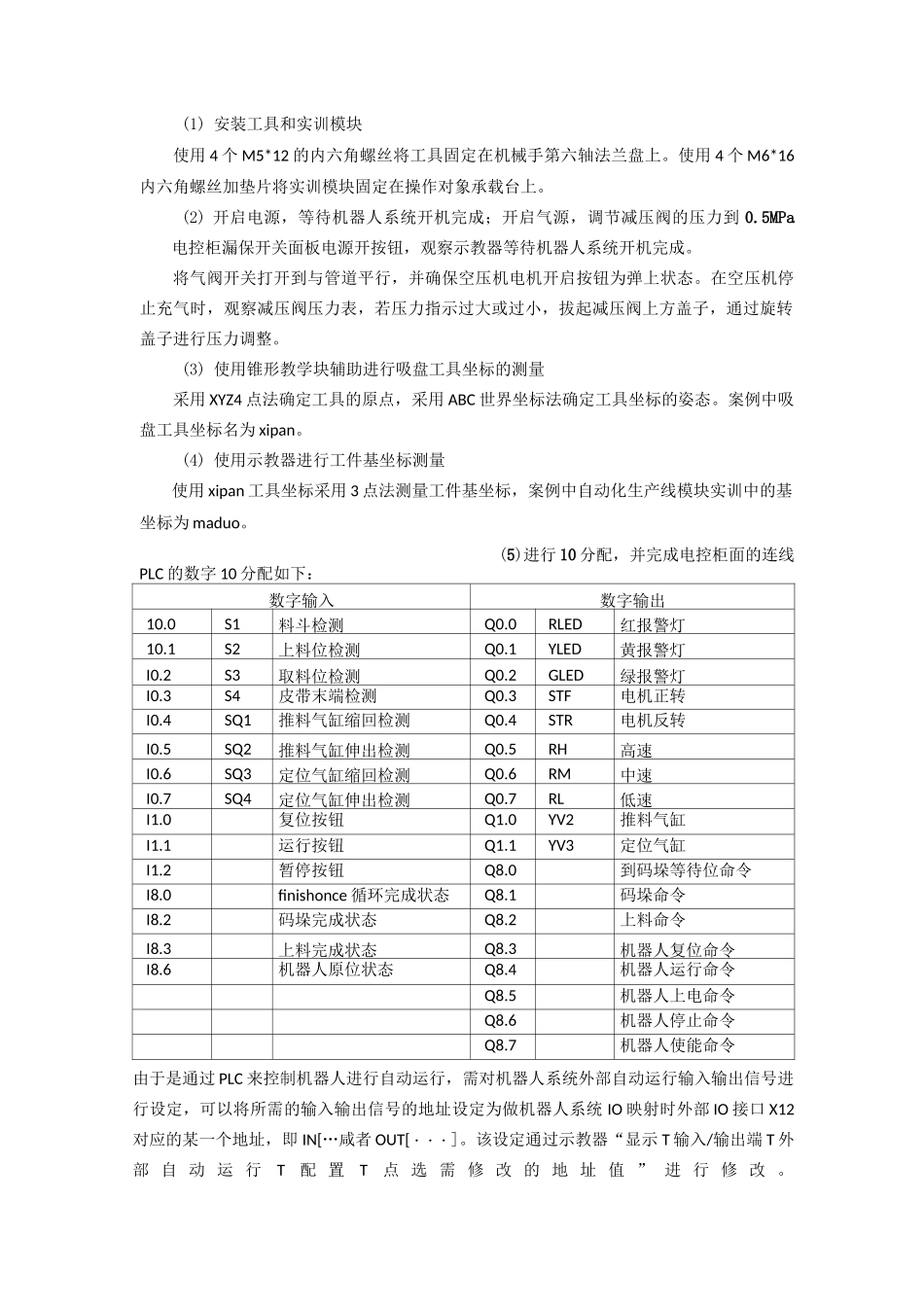
(5)进行10分配,并完成电控柜面的连线PLC的数字10分配如下:数字输入数字输出10
0S1料斗检测Q0
0RLED红报警灯10
1S2上料位检测Q0
1YLED黄报警灯I0
2S3取料位检测Q0
2GLED绿报警灯I0
3S4皮带末端检测Q0
3STF电机正转I0
4SQ1推料气缸缩回检测Q0
4STR电机反转I0
5SQ2推料气缸伸出检测Q0
5RH高速I0