实验14直流激励时霍尔传感器位移特性实验141270046自动化杨蕾生一、实验目的:了解直流激励时霍尔式传感器的特性
二、基本原理:根据霍尔效应,霍尔电势UH=KHIB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量
三、需用器件与单元:主机箱、霍尔传感器实验模板、霍尔传感器、测微头、数显单元
四、实验步骤:1、霍尔传感器和测微头的安装、使用参阅实验九
按图14示意图接线(实验模板的输出Vo1接主机箱电压表Vin),将主机箱上的电压表量程(显示选择)开关打到2V档
2、检查接线无误后,开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1使数显表指示为零
3、以某个方向调节测微头2mm位移,记录电压表读数作为实验起始点;再反方向调节测微头每增加0
2mm记下一个读数,将读数填入表14
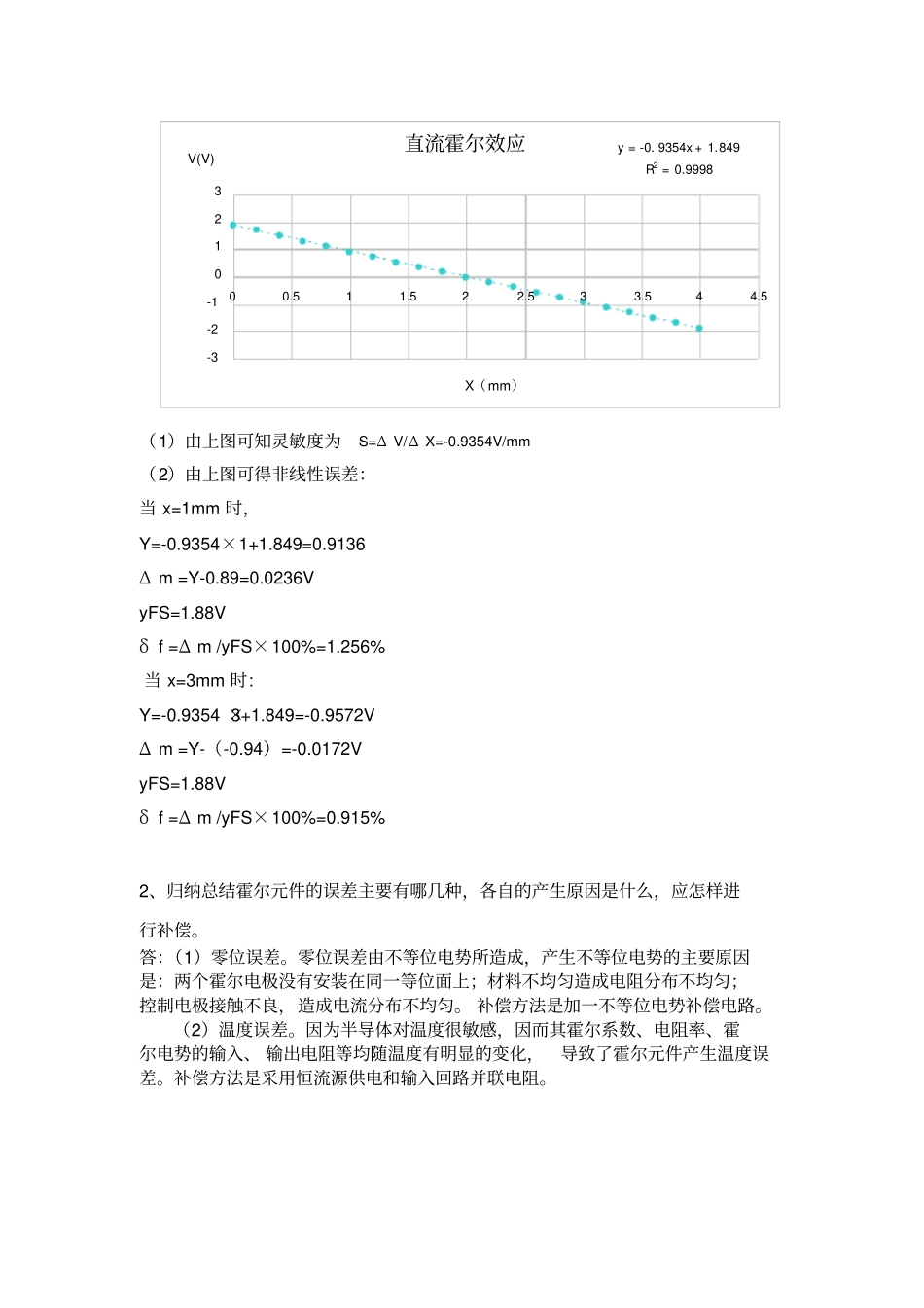
表14X(mm)V(mv)作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差
五、实验注意事项:1、对传感器要轻拿轻放,绝不可掉到地上
2、不要将霍尔传感器的激励电压错接成±15V,否则将可能烧毁霍尔元件
六、思考题:本实验中霍尔元件位移的线性度实际上反映的是什么量的变化
答:本人认为应该是实际的输入、输出与拟合的理想的直线的偏离程度的变化,当X不同的时候,实际的输出值与根据拟合直线得到的数值的偏离值是不相同的
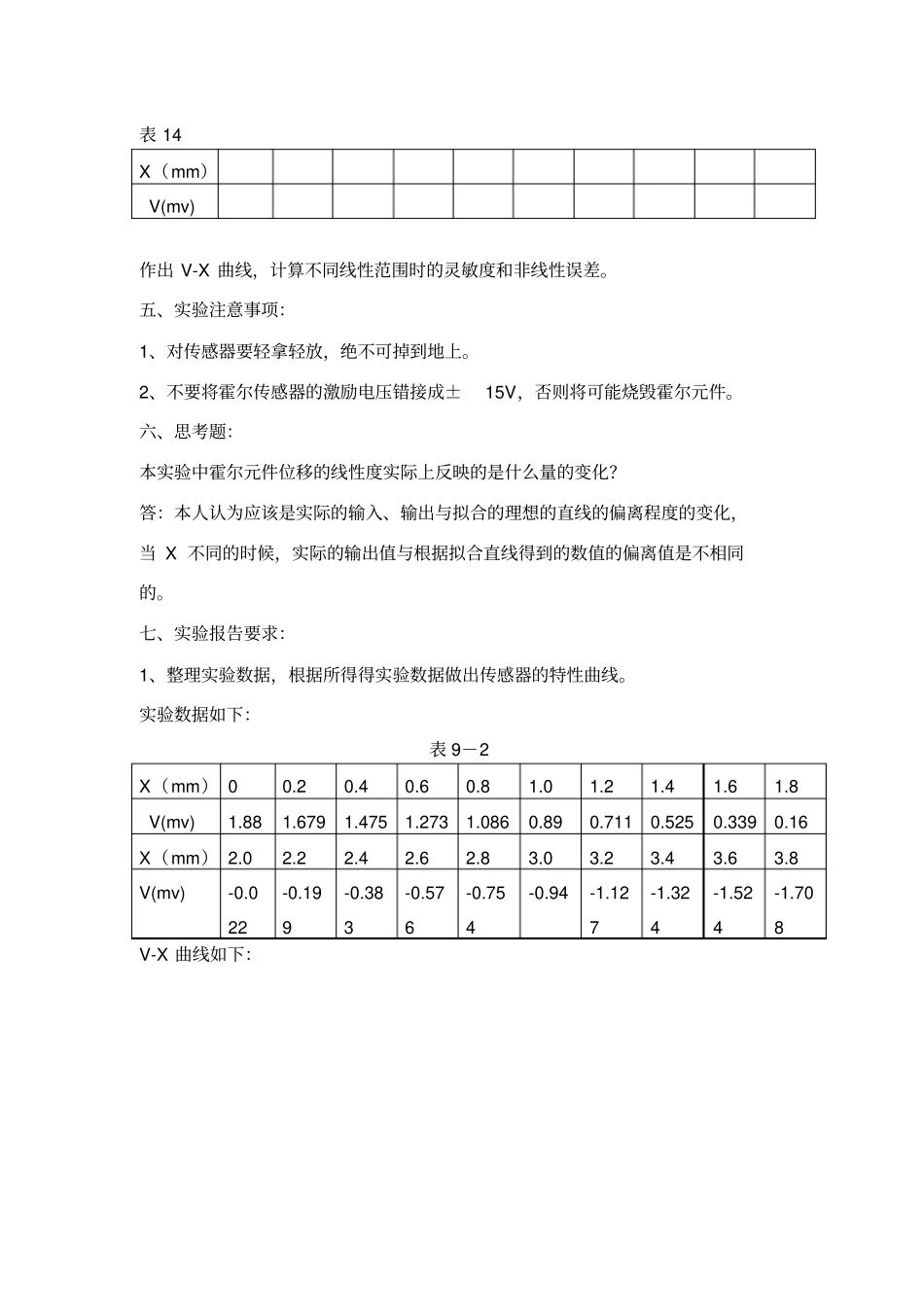
七、实验报告要求:1、整理实验数据,根据所得得实验数据做出传感器的特性曲线
实验数据如下:表9-2X(mm)00
8V(mv)1
16X(mm)2
8V(mv)-0