工程区管理1)新建工作区(1)点击菜单栏中的[工作区]-[新建]或者(Ctrl+N)
工作区显示如下界面
输入工作区名、标题后,点击[OK]按钮
(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击[OK]按钮
(3)工程创建完毕
工作区中会显示工程树,走位初始值,制成的[RC1]工程
2)打开工作区打开已经完成的工作区时,选择菜单栏中的[工作区]-[打开],或者点击工作栏中的(Ctrl+O),选择要打开的工作区后,点击[OK]按钮
3)关闭工作区与删除工作区关闭当前编辑中的工作区时,请点击菜单栏中的[工作区]-[关闭]
删除工作区的情况下,如果不关闭作为对象的工作区,就不能删除
4)工作区名/工作区标题的变更在以打开工作区的基础上,鼠标右击工作区名[工作区的编辑],工作区编辑画面显示后,输入新的工作区名和标题后,点击[OK]
5)工程的编辑6)工程树(1)离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序
(2)在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型号和控制器等相关信息
(3)备份显示从控制器备份过来的信息
(4)Tool功能显示其它功能
7)离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、在线和模拟三种
各个状态的含义和工程树的显示内容不尽相同
状态说明工程树的显示离线状态以电脑中保存的文件作为对象
工程树的工程名左面显示的图标为绿色,工程树中,显示离线和备份
在线状态连接机器人的控制器,进行控制器中信息的确认和变更
在线时,工程树的工程名显示图表为蓝色,工程树中显示离线、在线和备份
(1)离线部分(2)在线部分(2)备份部分(4)工具部分模拟状态以电脑上启动的虚拟控制器为对象,进行虚拟控制器中的信息确认和变更
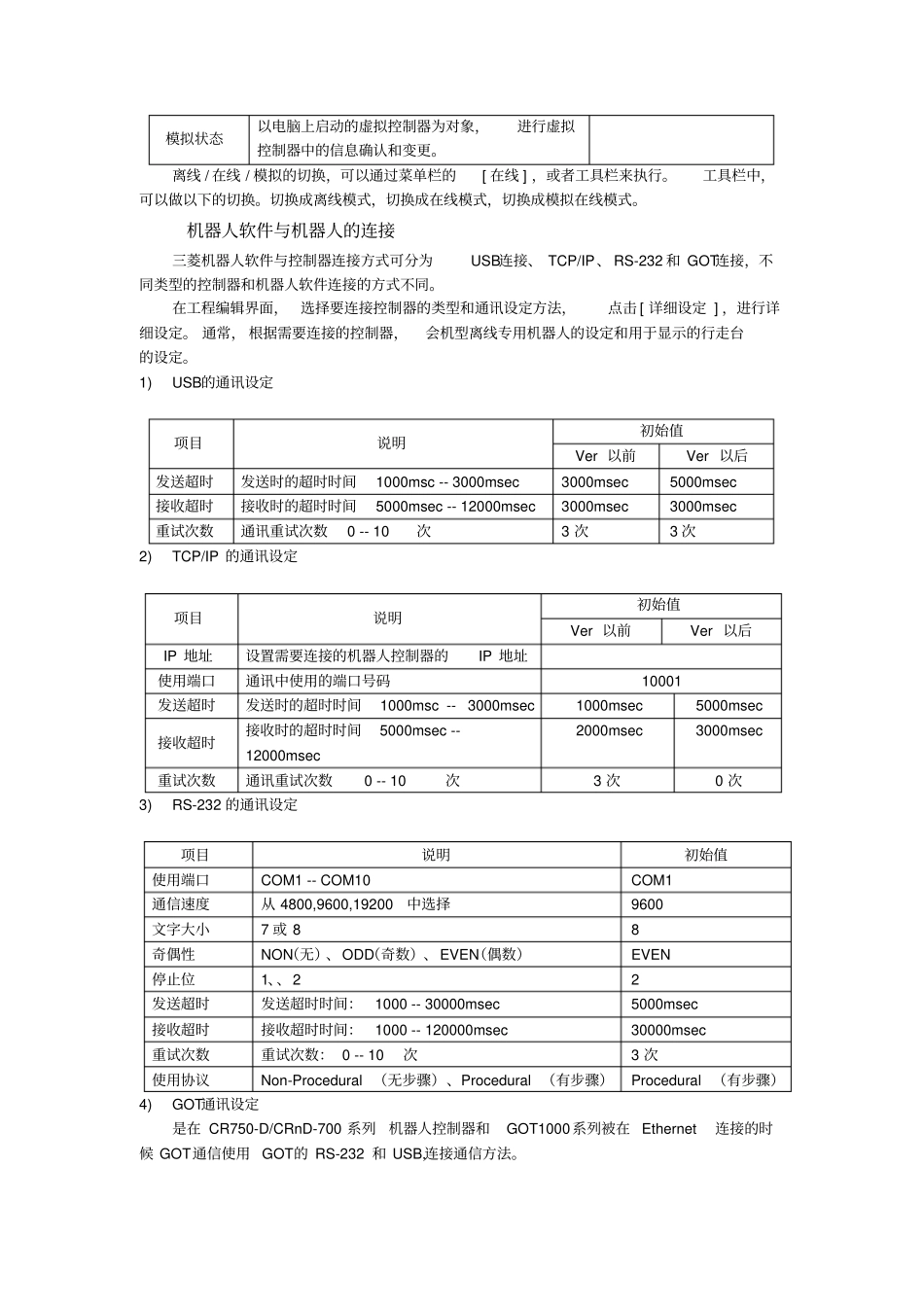
离线/在线/模拟的切换,可以通过菜单栏的[在线