111TI1It1Tf—jn111JLi
:]w1A」馴1ST1■11ABB机器人CCLink配置ABB机器人提供CC-Link总线的支持
ABB机器人通过DSQC378B(如下图)模块,把CC-Link协议转化成Devicenet协议,与机器人控制器通讯
上图X5部分为Devicenet通讯与地址设置端子,具体参见3
1节Devicenet的设置
X5X3部分为24V电源部分,针脚定义如下:SignalnamtX3pinFundion1SupplyM*右刿怜NC2IN-dL«nrwcted口ND3NC4UH沏屮护出們筍昭斗B港希匚]*£4vocASupplyw金P■"曲-X8端子为CC-Link总线接线端子,具体针脚定义如下
営pn白1HAme需pinFui^liiOrtSID1Stii«kl
C©ntop4«M#r45M&HwisingDiiAx3□igilalGND,corirBK^BdIDniynwilGNID1DBJ&gnBiEHC寻宙aRow与呻冥诲询使用DSQC378B模块需要机器人有709-1DevicenetMaster/Slave选项
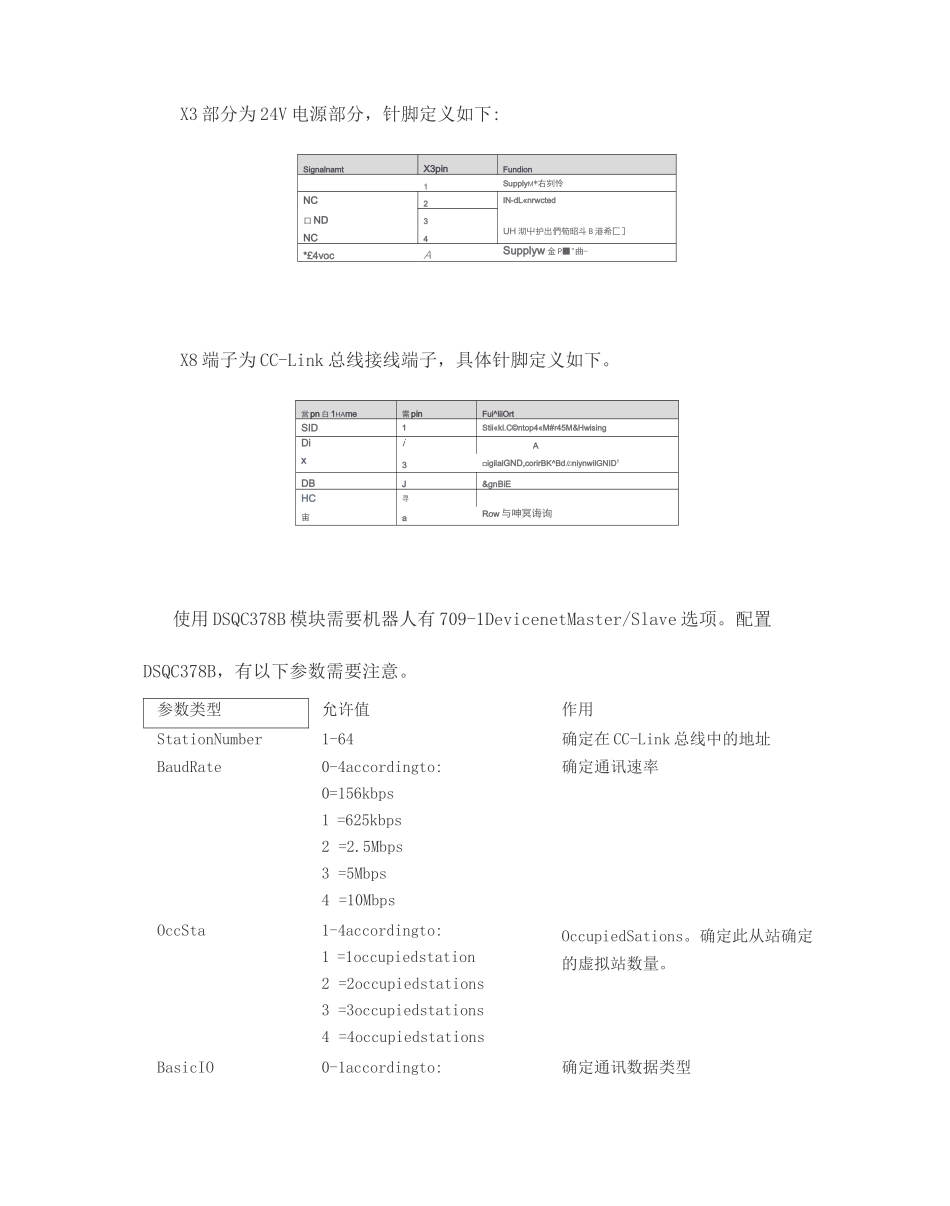
配置DSQC378B,有以下参数需要注意
参数类型允许值作用StationNumber1-64确定在CC-Link总线中的地址BaudRate0-4accordingto:0=156kbps1=625kbps2=2
5Mbps3=5Mbps4=10Mbps确定通讯速率OccSta1-4accordingto:1=1occupiedstation2=2occupiedstations3=3occupiedstations4=4occupiedstationsOccupiedSations
确定此从站确定的虚拟站数量
BasicIO0-1accordingto:确定通讯数据类型0=BitI/Oonly1=BitI/Oandwo