ABB工业机器人基础操作机器人的开启与关闭机器人数据的备份与恢复机器人的手动操作机器人更新转数计数器机器人的开启与关闭•操作机器人的第一步就是开机,将机器人控制柜上的总电源旋钮从【OFF】扭转到【ON】
•关机则是从【ON】扭转到【OFF】即可
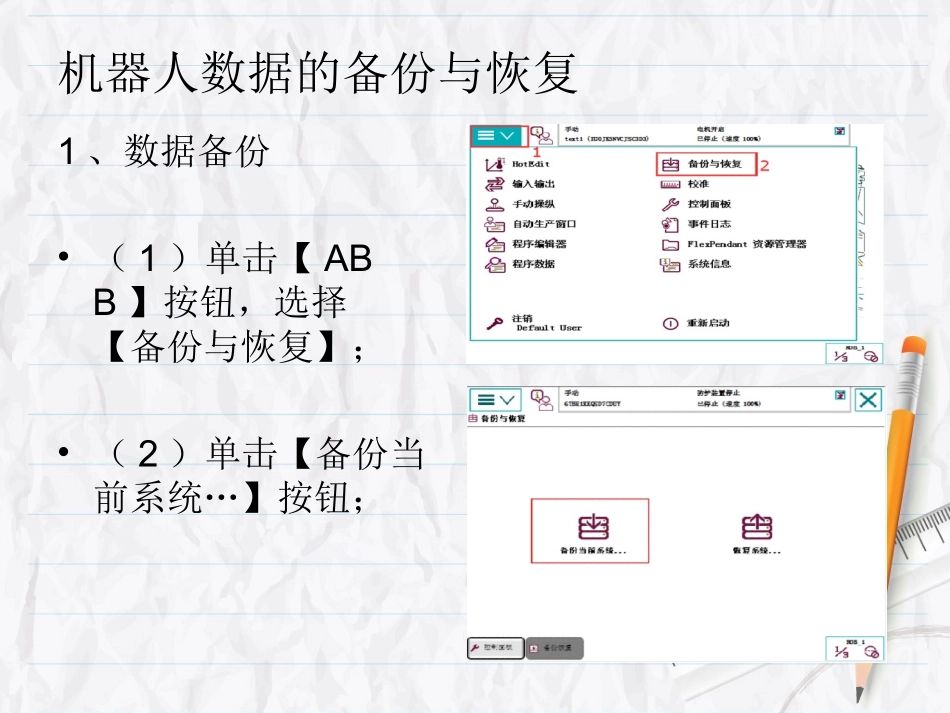
机器人数据的备份与恢复1、数据备份•(1)单击【ABB】按钮,选择【备份与恢复】;•(2)单击【备份当前系统…】按钮;(3)单击【ABC…】按钮,进行存放备份数据目录名称的设定;单击【…】,选择备份存放的位置(机器人硬盘或者USB存储设备);单击【备份】进行备份的操作
4)等待备份的完成;2、数据恢复(1)单击【ABB】按钮,选择【备份与恢复】,单击【恢复系统…】按钮;(2)单击【…】,选择备份存放的目录,单击【恢复】,完成系统恢复操作
机器人的手动操作•手动操作机器人运动一共有三种模式:单轴运动、线性运动和重定位运动
1、单轴运动•ABB机器人六个伺服电动机分别驱动机器人的六个关节轴,手动操作一个关节轴的运动,就称之为单轴运动
单轴运动是每一个轴可以单独运动,所以在一些特别的场合使用单轴运动来操作会很方便快捷,比如说在进行转数计数器更新的时候可以用单轴运动的操作,还有机器人出现机械限位和软件限位,也就是超出移动范围而停止时,可以利用单轴运动的手动操作,将机器人移动到合适的位置
单轴运动在进行粗略的定位和比较大幅度的移动时,相比其他的手动操作模式会方便快捷很多
1、单轴运动操作步骤•(1)将机器人控制柜上“机器人状态钥匙”切换到右边的手动状态
•(2)在状态栏中,确认机器人的状态已经切换为手动,如图所示,机器人当前为手动状态
•(3)单击【ABB】按钮,选择【手动操纵】;(4)单击【动作模式】;5)选中【轴1-3】,然后单击【确定】,就可以对轴1-3进行操作;选中【轴4-6】,然后单击【确定】,就可以对轴4-6进行操作;(6)用手按