《汽车机械基础课程组》汽车机械基础机电工程系汽车机构分析第11章机构的组成及汽车常用机构研究内容:(1)研究机构的组成及其具有确定运动的条件;(2)根据结构特点进行机构的结构分类;(3)研究机构的组成原理
研究目的:在机构设计中,需要知道机构是怎样组合起来的,而且在什么条件下才能实现确定的运动;对机构组成原理的研究还可以为新机构的创造提供途径;通过对机构的结构分析与分类,可以为举一反三地研究机构的运动分析和动力分析提供方便
第一节机构的组成与运动简图一、机构的组成机构是由各个具有确定相对运动的运动单元组成
构件构件(link)—机器中每一个独立的运动单元体
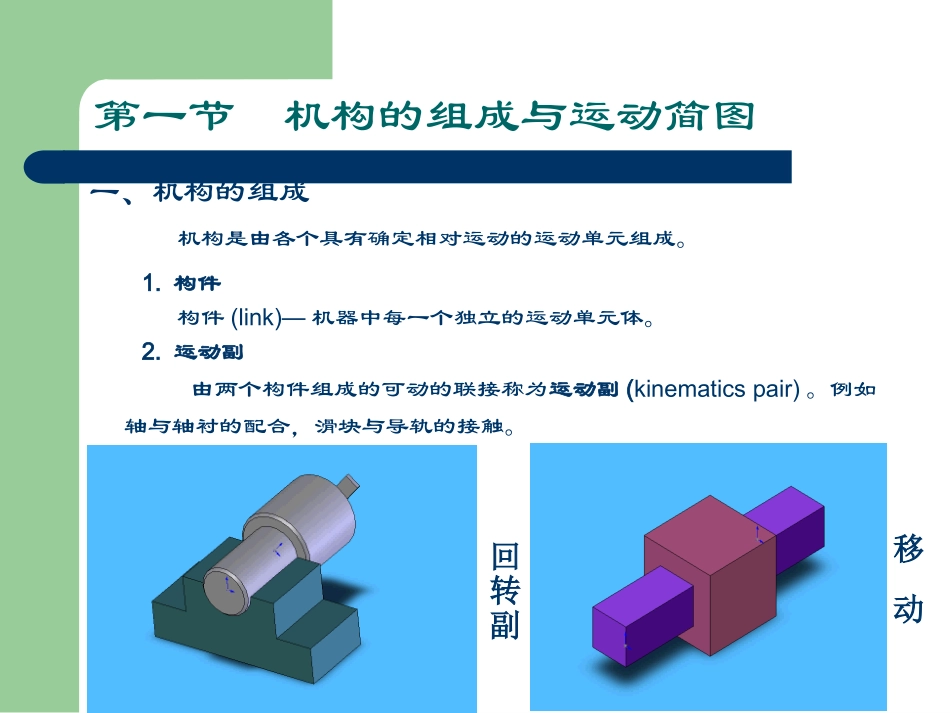
运动副由两个构件组成的可动的联接称为运动副(kinematicspair)
例如轴与轴衬的配合,滑块与导轨的接触
回转副移动副一、机构的组成两齿轮轮齿的啮合,球面与平面的接触,圆柱与平面的接触
齿轮副平面机构构件在同一平面或在相互平行的平面内运动的机构
(常用的机构大多数为平面机构)空间机构至少有两个构件能在三维空间中相对运动
空间任意两个构件1与2,当它们尚未构起运动副之前,构件1相对于构件2共有6个相对运动的自由度
当两构件以某种方式相联接而构成运动副,则两者间的相对运动便受到一定的约束,其相对运动自由度减少的数目就等于该运动副所引入的约束的数目
两构件构成运动副后所受到的约束数最少为1,而最多为5
二、自由度、约束与运动副自由度:约束:对独立运动的限制构件含有独立运动的数目运动副的分类:(1)按两构件的接触情况进行分:点或线接触而构成的运动副统称为高副;面接触而构成的运动副则称为低副
(2)按两构件之间的相对运动的不同分:转动副或回转副、移动副、螺旋副、球面副、平面运动副、空间运动副
运动副的符号转动副:移动副:凸轮副:齿轮副:运动副的符号三、机构运动简图用简单的线条和规定的符号表示组成机构的构件和运动