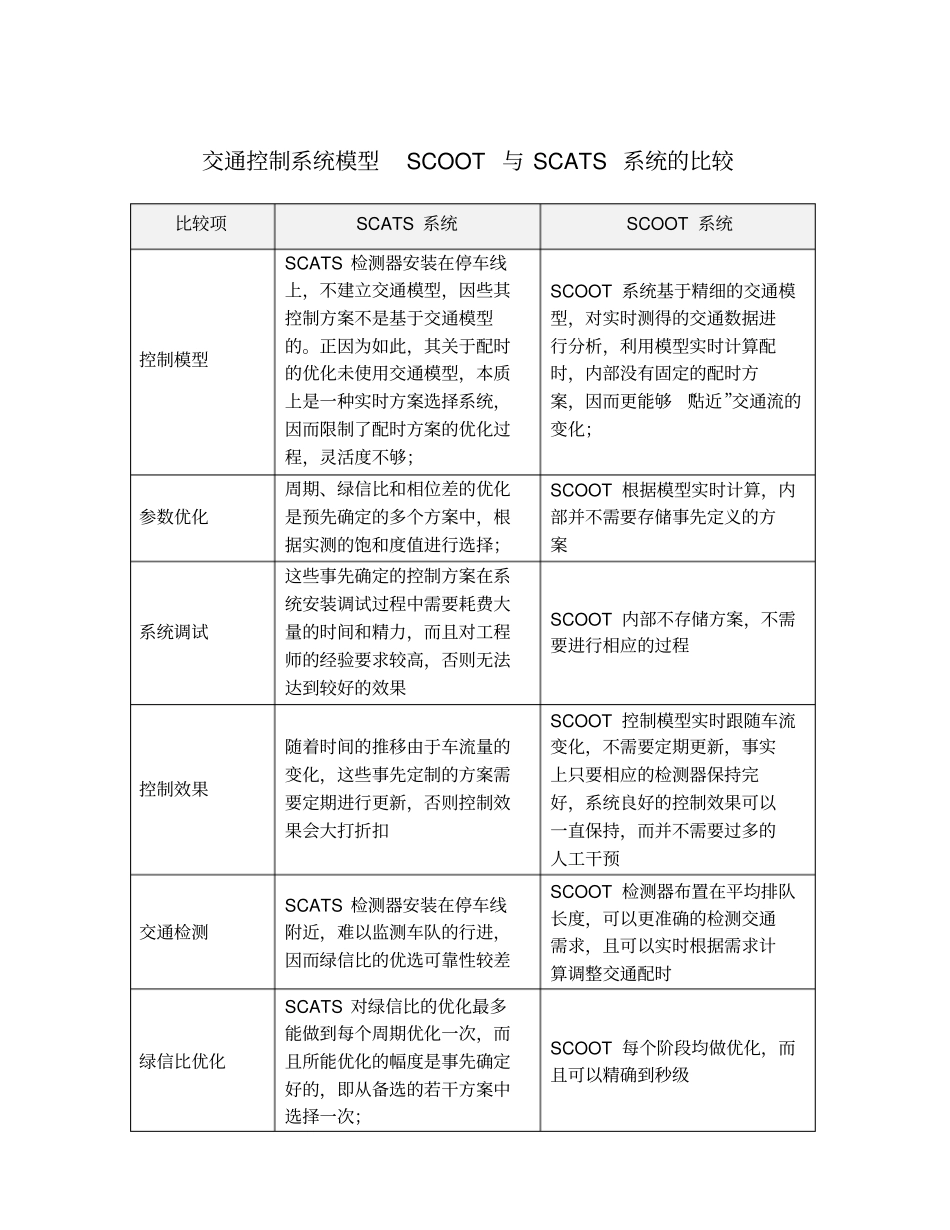
交通控制系统模型SCOOT与SCATS系统的比较比较项SCATS系统SCOOT系统控制模型SCATS检测器安装在停车线上,不建立交通模型,因些其控制方案不是基于交通模型的
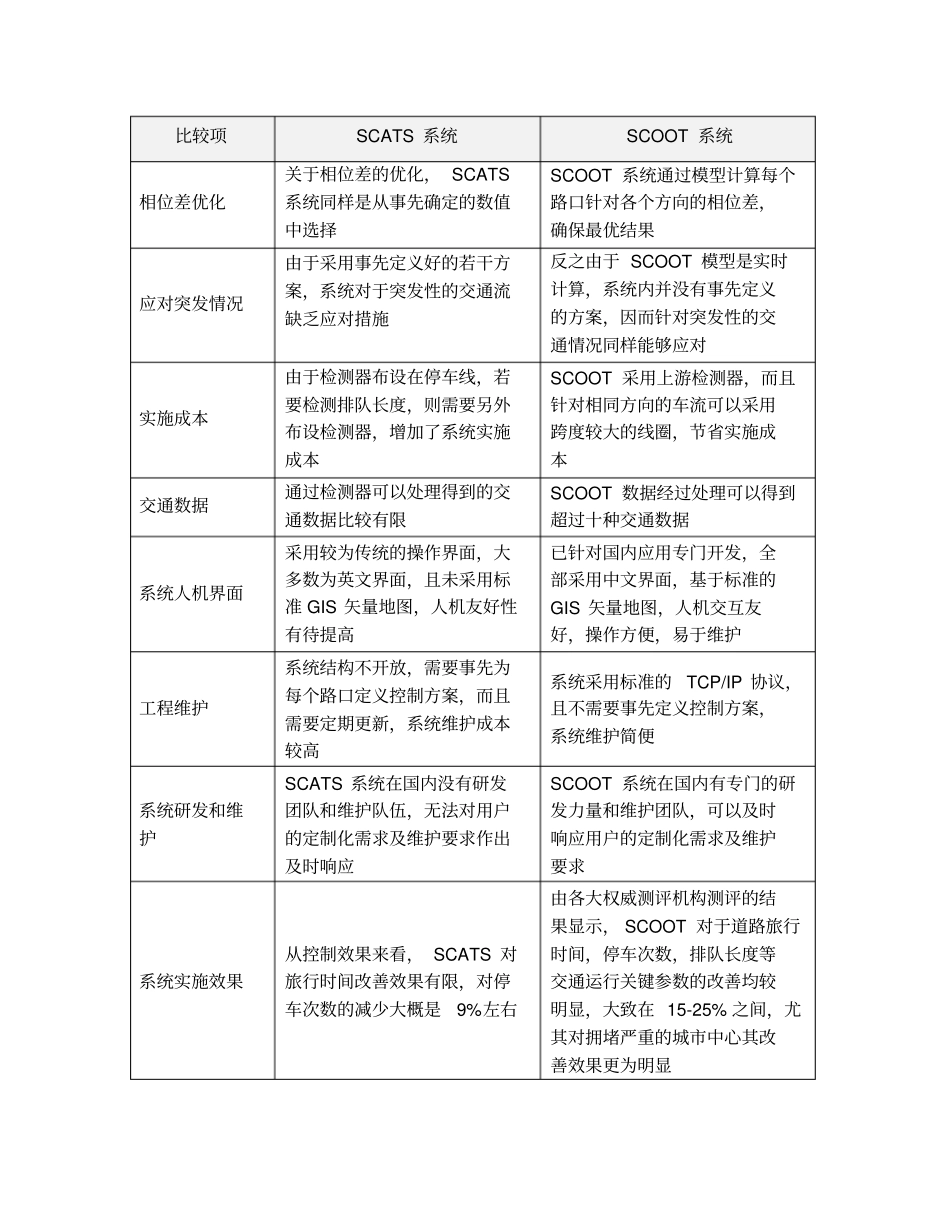
正因为如此,其关于配时的优化未使用交通模型,本质上是一种实时方案选择系统,因而限制了配时方案的优化过程,灵活度不够;SCOOT系统基于精细的交通模型,对实时测得的交通数据进行分析,利用模型实时计算配时,内部没有固定的配时方案,因而更能够“贴近”交通流的变化;参数优化周期、绿信比和相位差的优化是预先确定的多个方案中,根据实测的饱和度值进行选择;SCOOT根据模型实时计算,内部并不需要存储事先定义的方案系统调试这些事先确定的控制方案在系统安装调试过程中需要耗费大量的时间和精力,而且对工程师的经验要求较高,否则无法达到较好的效果SCOOT内部不存储方案,不需要进行相应的过程控制效果随着时间的推移由于车流量的变化,这些事先定制的方案需要定期进行更新,否则控制效果会大打折扣SCOOT控制模型实时跟随车流变化,不需要定期更新,事实上只要相应的检测器保持完好,系统良好的控制效果可以一直保持,而并不需要过多的人工干预交通检测SCATS检测器安装在停车线附近,难以监测车队的行进,因而绿信比的优选可靠性较差SCOOT检测器布置在平均排队长度,可以更准确的检测交通需求,且可以实时根据需求计算调整交通配时绿信比优化SCATS对绿信比的优化最多能做到每个周期优化一次,而且所能优化的幅度是事先确定好的,即从备选的若干方案中选择一次;SCOOT每个阶段均做优化,而且可以精确到秒级比较项SCATS系统SCOOT系统相位差优化关于相位差的优化,SCATS系统同样是从事先确定的数值中选择SCOOT系统通过模型计算每个路口针对各个方向的相位差,确保最优结果应对突发情况由于采用事先定义好的若干方案,系统对于突发性的交通流缺乏应对措施反之由于SC