第二章齐次坐标变换ChapterⅡHomogeneousTransformation2
2点向量和平面的描述2
4平移变换2
5旋转变换2
7相对变换2
8物体的描述2
10一般性旋转变换2
11等价旋转角与旋转轴2
12扩展与缩小2
13透视变换2
14变换方程2
1引言(Introduction)机器人操作涉及到各物体之间的关系和各物体与机械手之间的关系
这一章将给出描述这些关系必须的表达方法
类似这种表示方法在计算机图形学中已经解决
在计算机图形学和计算机视觉中,物体之间的关系是用齐次坐标变换来描述的
在本课程我们将采用齐次坐标变换来描述机械手各关节坐标之间、各物体之间以及各物体与机械手之间的关系
本章首先介绍向量和平面的表示方法,然后引出向量和平面的坐标变换,这些变换基本上是由平移和旋转组成,因此可以用坐标系来描述各种物体和机械手的空间位置和姿态
稍后还要介绍逆变换,逆变换是运动学求解的基础
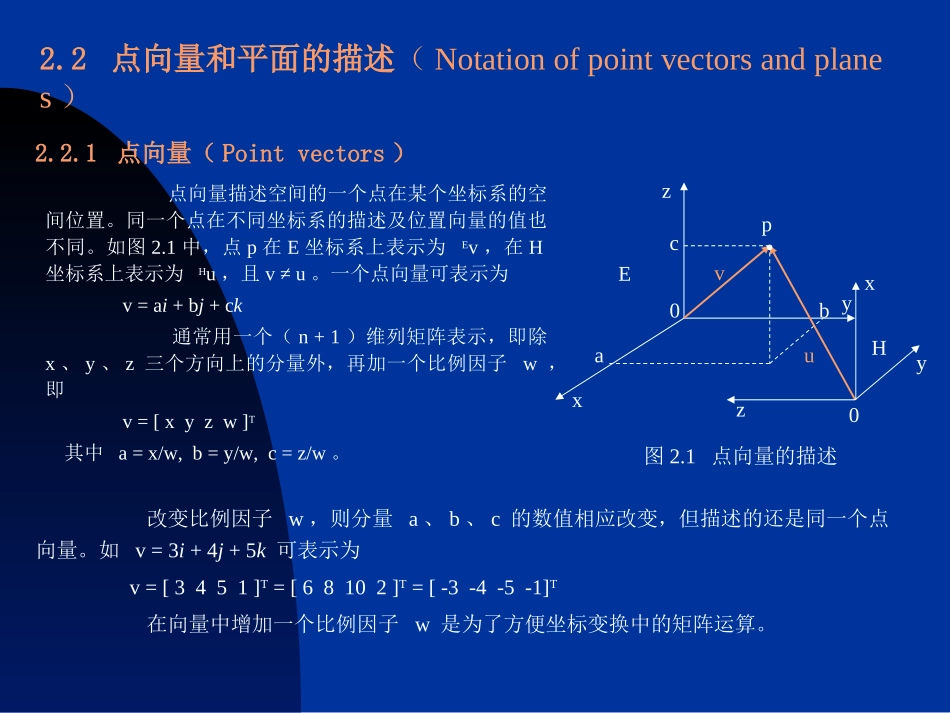
a0vzyxzyxpcb0uEH图2
1点向量的描述•2
2点向量和平面的描述(Notationofpointvectorsandplanes)2
1点向量(Pointvectors)点向量描述空间的一个点在某个坐标系的空间位置
同一个点在不同坐标系的描述及位置向量的值也不同
1中,点p在E坐标系上表示为Ev,在H坐标系上表示为Hu,且v≠u
一个点向量可表示为v=ai+bj+ck通常用一个(n+1)维列矩阵表示,即除x、y、z三个方向上的分量外,再加一个比例因子w,即v=[xyzw]T其中a=x/w,b=y/w,c=z/w
改变比例因子w,则分量a、b、c的数值相应改变,但描述的还是同一个点向量
如v=3i+4j+5k可表示为v=[3451]T=[68102]T=[-3-4-5-1]T在向量中增加一个比例因子