工业机器人控制系统工业机器人组成与工作原理(控制概述)1
1工业机器人的基本组成1
1工业机器人的基本组成1
2工业机器人工作原理与技术参数1
2工业机器人工作原理与技术参数1
3工业机器人控制技术综述1
3工业机器人控制技术综述1
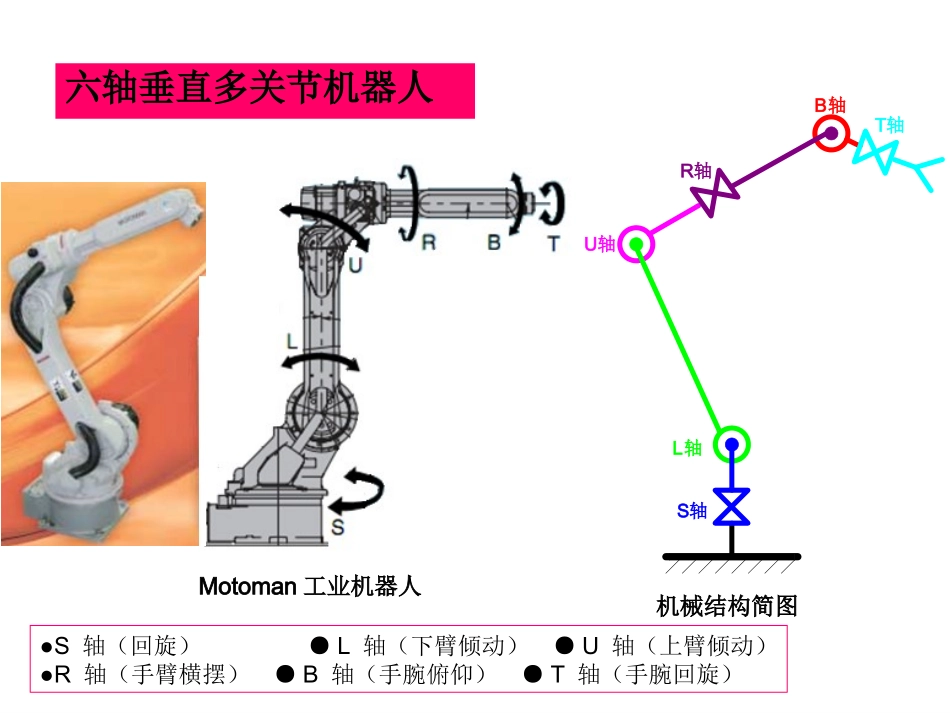
1工业机器人的基本组成主要由机器人本体、控制器、示教器三大部件组成六轴垂直多关节机器人机械结构简图●S轴(回旋)●L轴(下臂倾动)●U轴(上臂倾动)●R轴(手臂横摆)●B轴(手腕俯仰)●T轴(手腕回旋)Motoman工业机器人S轴L轴U轴R轴B轴T轴机器人关节
控制器是根据指令以及传感器信息控制机器人完成一定动作或作业任务的装置,是决定机器人功能和性能的主要因素,也是机器人系统中更新和发展最快的部分
其基本功能有:示教、记忆、位置伺服、坐标设定
开发程度:封闭型、开放性和混合型
【目前基本上都是封闭型系统(如日系)或混合型系统(如欧系)】控制方式:集中式控制和分布式控制
机器人控制器工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环
一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行设定而实现位置控制、速度控制、转矩控制等多种功能
集中式控制系统结构
组织层(作业控制)协调层(运动控制)执行层(驱动控制)分布式控制系统结构KRC4性能参数:全部采用总线形式处理器库卡(工业)PC(2
6GHZ)操作系统微软WINDOWSXP控制轴数8个AC伺服马达驱动与外围设备通讯接口:Profinet,Profibus,Interbus,EtherCAT,Ethernet编程及控制库卡SmartPAD例:库卡工业机器人控制器KRC4例:电装(DENSO)机械手•系统组成11感受系统由内部传感器模块和外部传感器模块组成,用以获取内部和外部环境状态中有意义的信息
22智能传感器的使用提高了机器人的机动性、