辽宁 1_程技术人学硕十学位论文3
3反铲工作装置的运动分析 由 3
2 中 对反铲 工作装 置的结构特 点及运 动特性 的分析可 知,其各部件运 动轨 迹受 多重结 构制约 及边界条件 的限制 ,表达式 必然十分 的复杂
为简化之,本文特采用以下方法,先分析固定坐标系方式下反铲工作装置各个机构的运动特性,得到一系列运动方程; 再选用变换矩阵法来进行综合运 动分 析,同时得到 数学 公式表述更 简洁且有利 于计算机 编程 的运动关系方程
反铲 装置的 具体 结构型式 有多种 ,按运动 学分析 ,其 中有实质差别的机构型式不过几种,且它们之间还存在着许多共同点,现对最典型的结构型式作详细的运动分析,当反铲机构的几何参数确定以后,反铲机构的运动就取决于动臂油缸的长度 LL,、斗杆油缸的长度 LL: 和铲斗油缸的长度LL3,现选取固定直角坐标系 XOY 对反铲机构进行运动分析
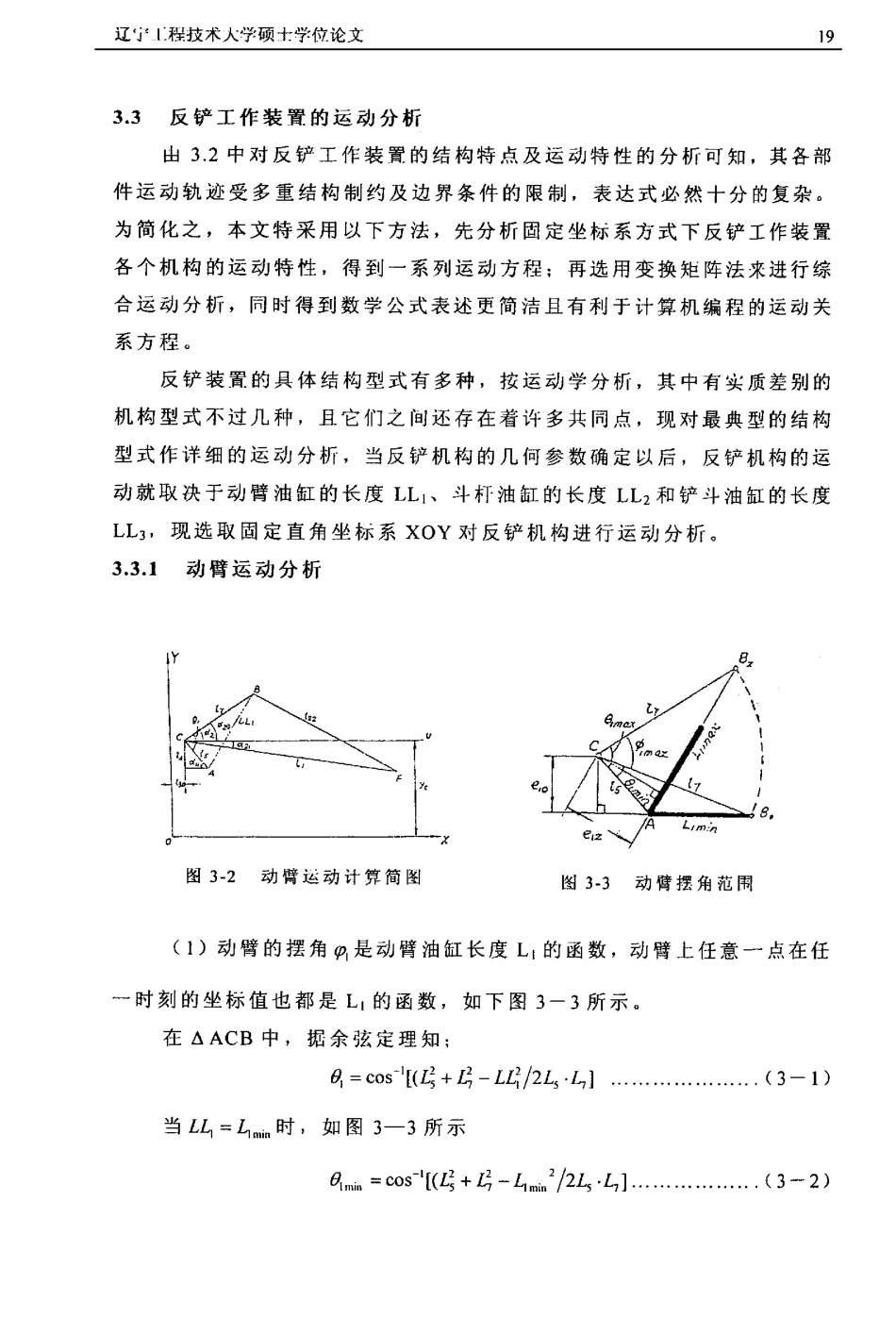
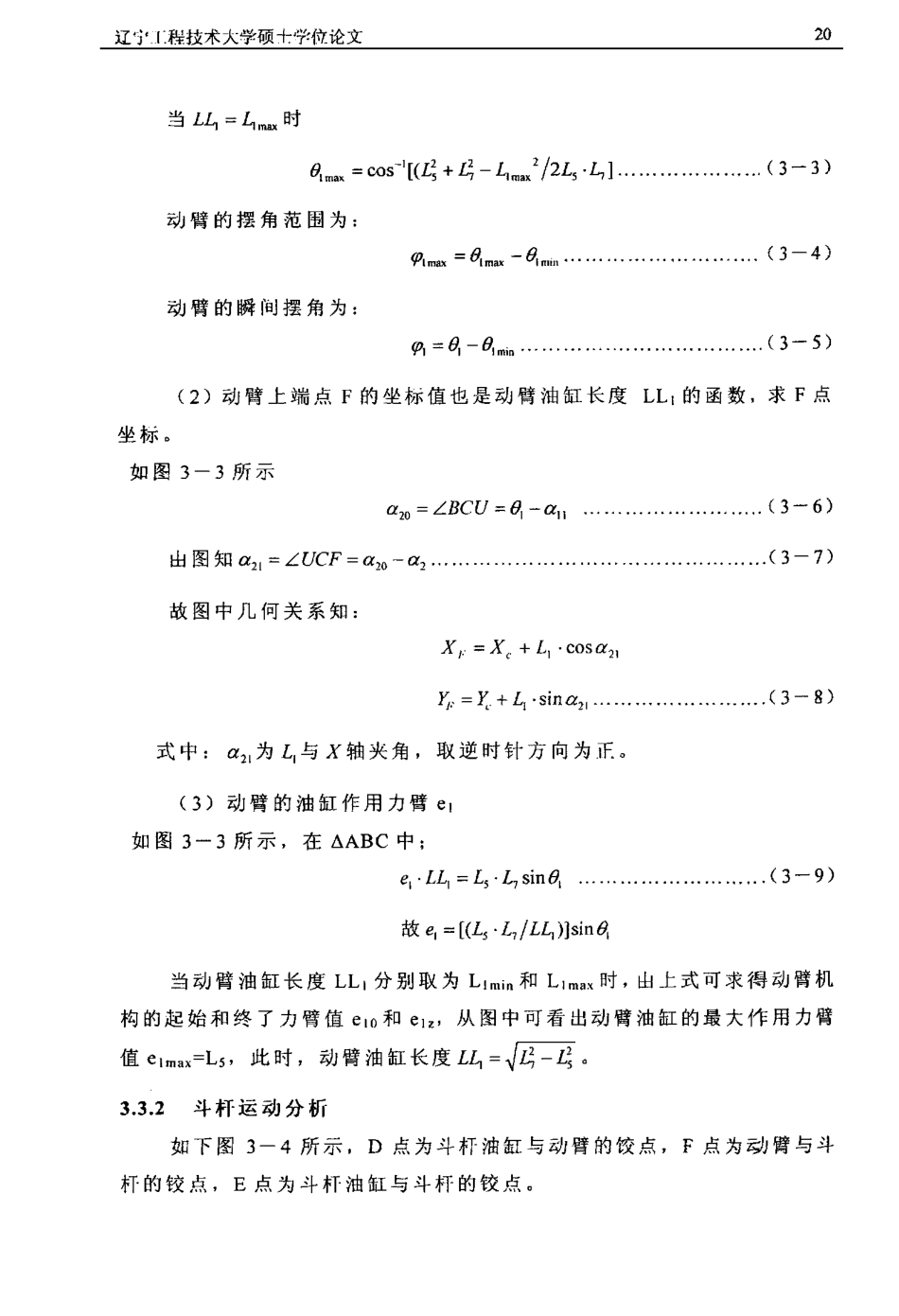
1动臂运动分析户习 习o, yp}tli Gz}dyfi lmd4斌嗽es丫乙,川汤图3-2动臂运动计算简图图 3-3动臂摆角范围( I) 动臂的摆角ol i是动臂油缸长度 L, 的函数,动臂上任意一点在任一时刻的坐标值也都是 L
的函数,如下图3- 3所示
在 △ACB 中,据余弦定理知; B,一Cos-' [(以+军一LL,12Ls
41( 3 一 1 )当LL, =吞mi
时,如图 3- 3 所示日
、=Cos ,仪殡十鲜一Lmi
i/2Ls'L,]
⋯⋯(3一2)辽宁 I 程技术大学硕十学位论文当LI, = 石
=- s -,I(fs十麟一L,_ ' 12L, -4 1
⋯,二(3一3)动 臂 的摆 角范 围为:971m
=叹, 一召- 11
⋯( 3 一 4 )动 臂 的瞬 间摆 角为:97,= 6,一91