机械原理课程设计说明书学 院:五邑大学机电工程学院专 业:机械工程及其自动化班 级:AP09081 班学生姓名:戴苑城学 号:AP0908106题 目:机械运动参数测试仪分析日 期:2012
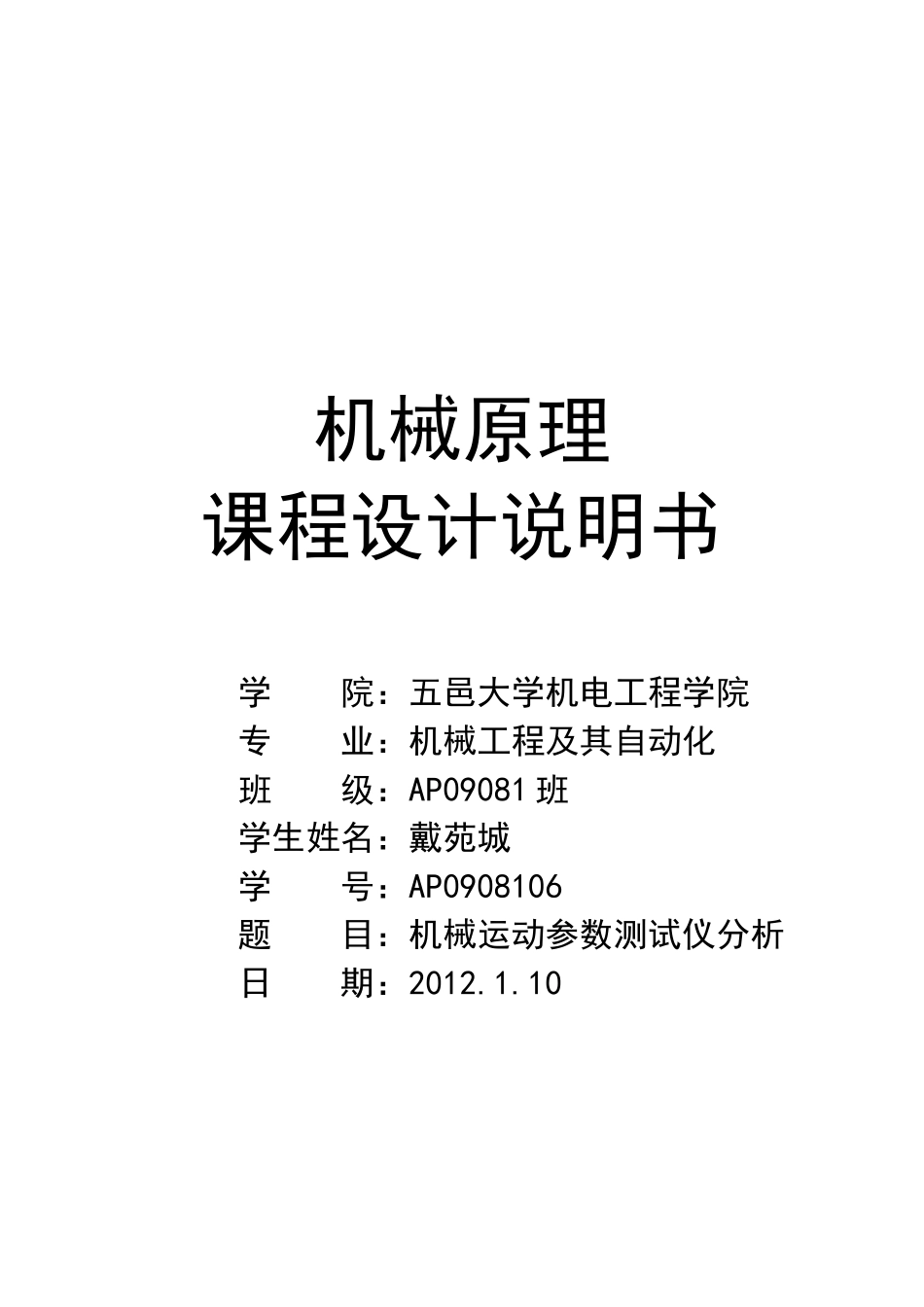
10机械运动参数测试仪分析戴苑城 AP0908106一、仪器机构简介如下图所示,实验仪器以蜗杆箱为分界,分为前后两部分
前部分主要分为:电机、传感器、传感圆盘;后部分别为:导轨架、导轨框,导杆、滑块、固定架和法兰盘
电机是整个机构的动力源,透过蜗杆箱以蜗杆为原动件作减速运动
动力由蜗轮主轴输出,传给法兰盘和传感圆盘,由传感器接收传动圆盘的转动信号,通过输出设备输出信号
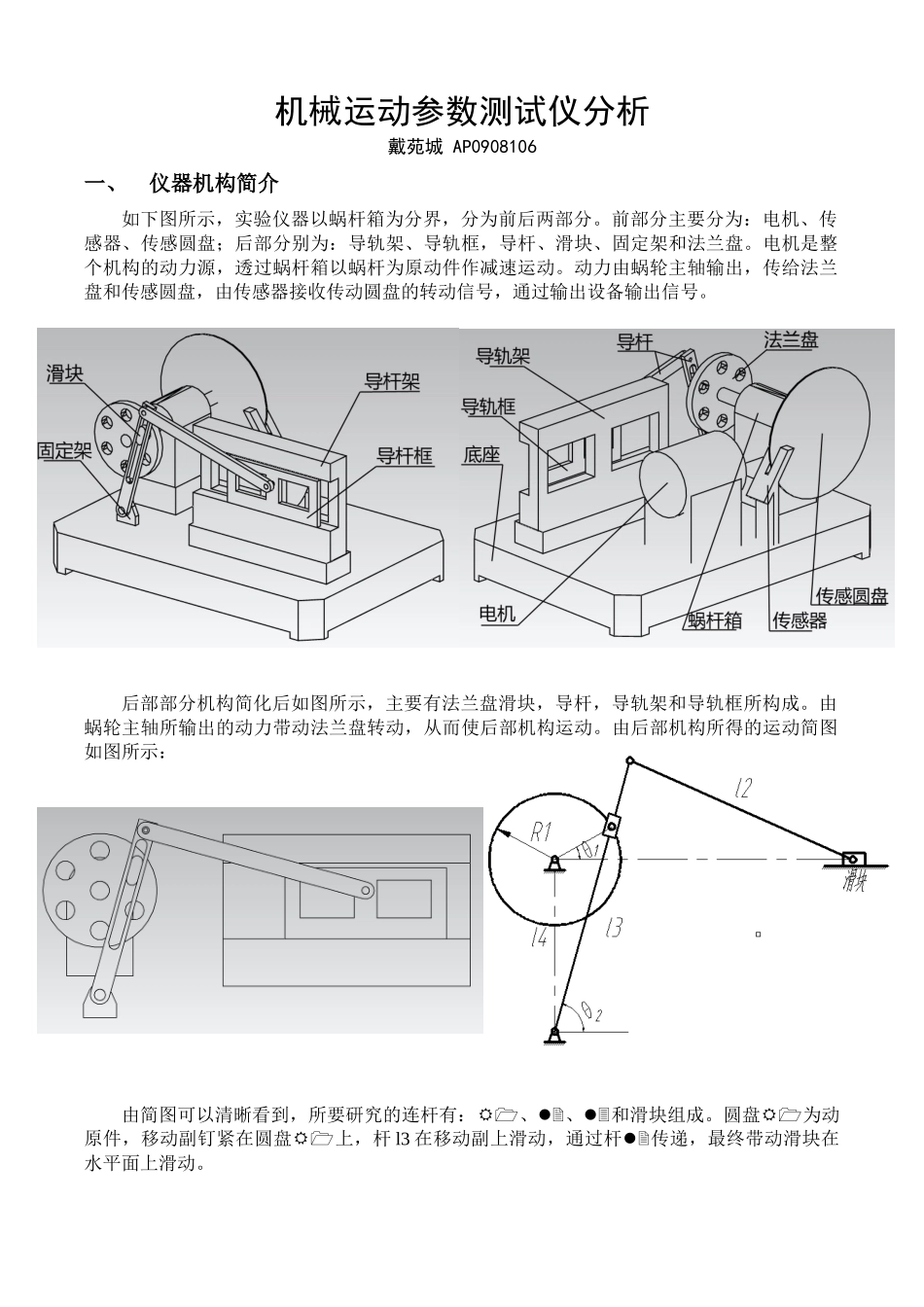
后部部分机构简化后如图所示,主要有法兰盘滑块,导杆,导轨架和导轨框所构成
由蜗轮主轴所输出的动力带动法兰盘转动,从而使后部机构运动
由后部机构所得的运动简图如图所示:由简图可以清晰看到,所要研究的连杆有:、、和滑块组成
圆盘为动原件,移动副钉紧在圆盘上,杆 l3 在移动副上滑动,通过杆传递,最终带动滑块在水平面上滑动
二、机构分析如 上 面 见 图 所 示 可 知 , 机 构 由 个 活 动 构 件 所 组 成 , 共 有 个 低 副 , 其 中R1=42mm,l2=240mm,l3=180mm,l4=110mm,圆盘上的转动副与水平面的夹角为,杆 l3 与水平面的夹角为,圆盘 R1 的角速度 w=1 rad/s,其自由度计算:由自由度计算公式:可得该机构自由度(1) 位置分析:机构矢量方程及方位角如图示,投影关系的以下公式: (2) 投影方程: : : : : 综上得:滑块 D 的位移方程:s=+C常数C:(注:为的初始角,为的初始角)三、计算机分析本环节是以上面提及到的测试仪中的曲柄滑块机构和曲柄摆动导杆机构为测试对象,通过实验了解位移、速度、加速度、角速度、