第六章 空三加密 空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密
概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)
本章以MapMatrix系统空三加密相关模块AATMatrix的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容
作为补充和比较,又增加介绍了 LPS空三的过程
1 实 习 内 容 和 要 求 本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatrix 和LPS 两个软件进行空三加密的流程
2 AATMatrix 空 三加密 6
1 原理和操作流程概述 利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量
区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础
区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高
成为空三的主流方法
光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标
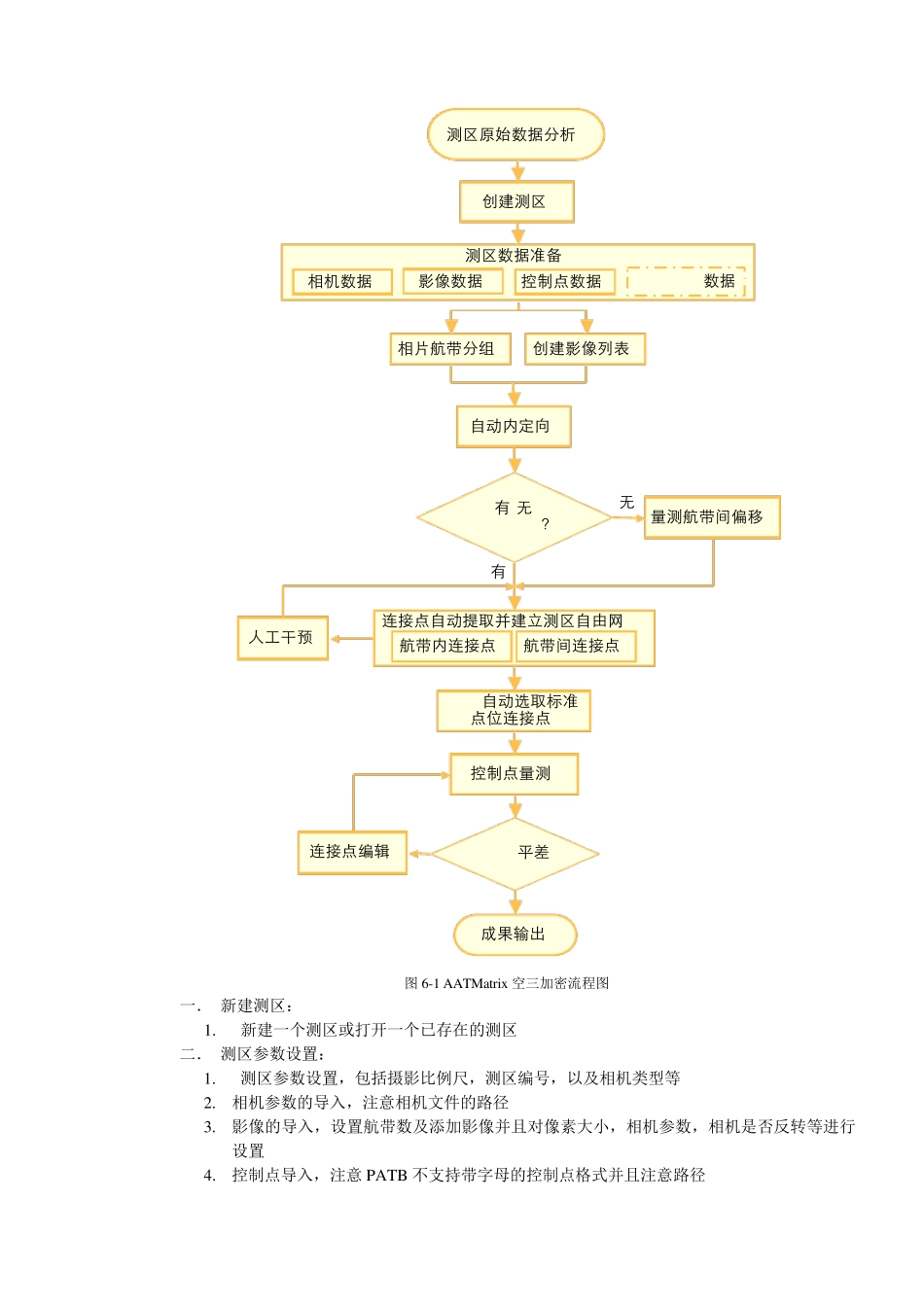
AATMatrix单个测区工作流程图如图6-1所示: 测区数据准备测区原始数据分