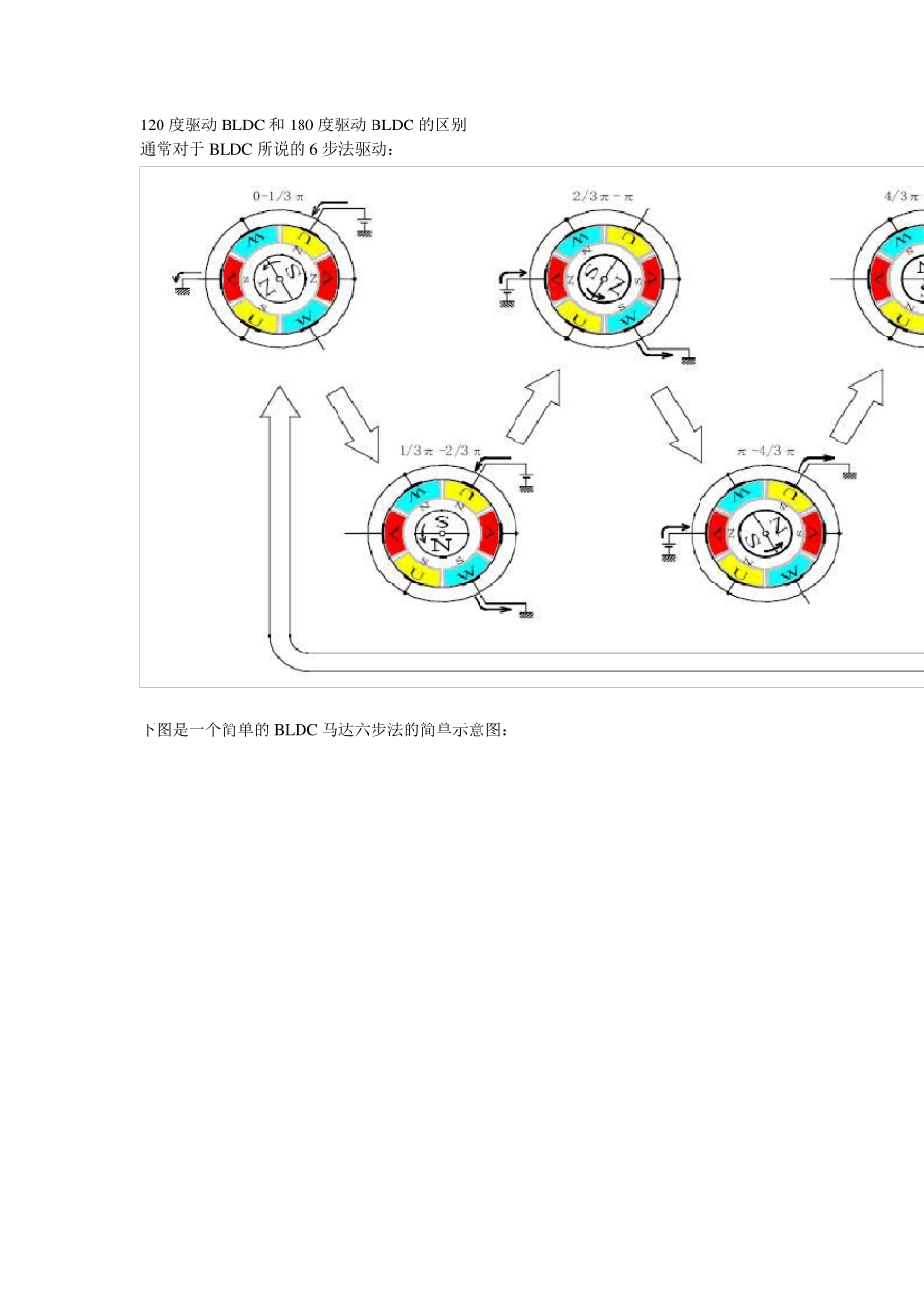
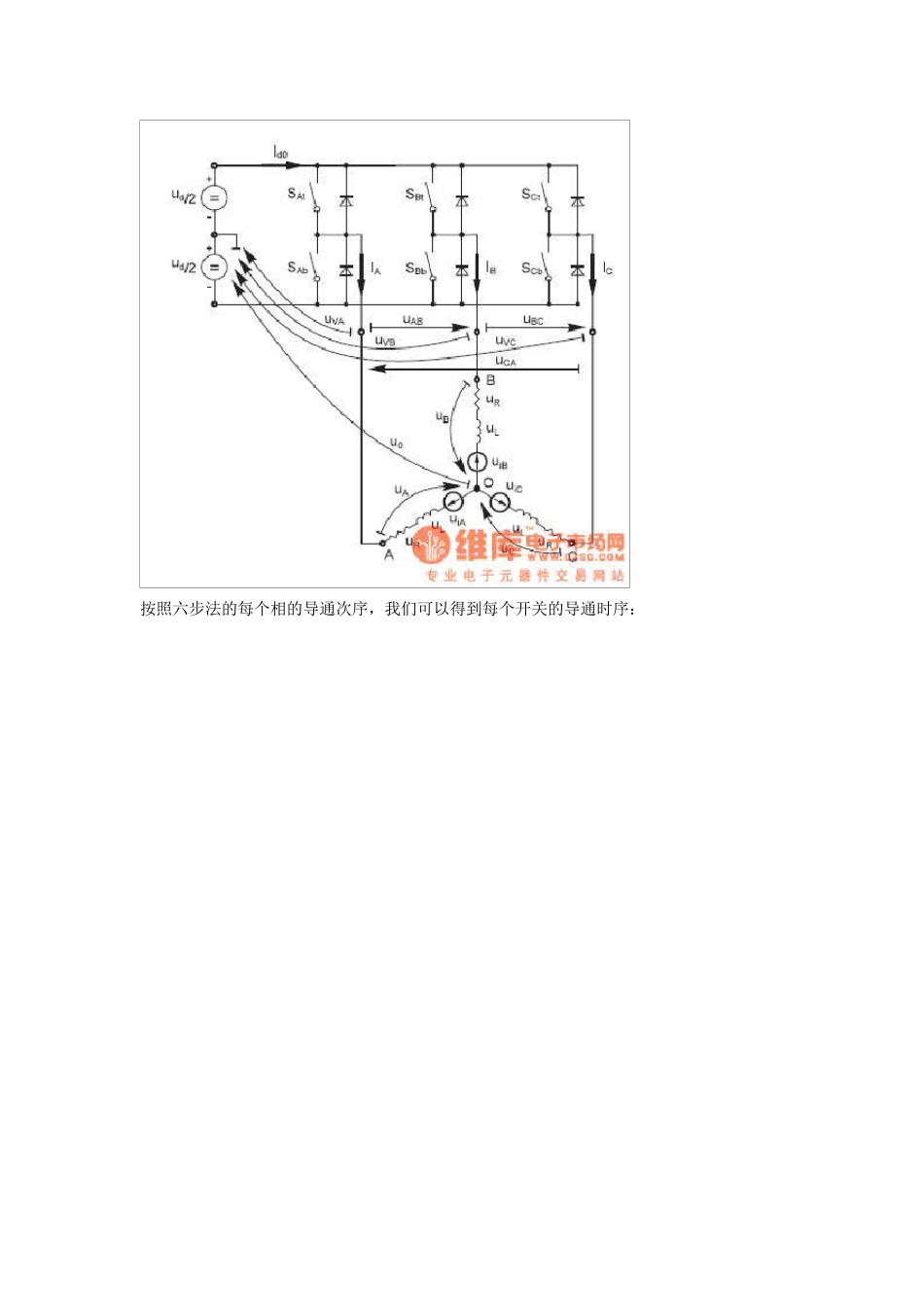
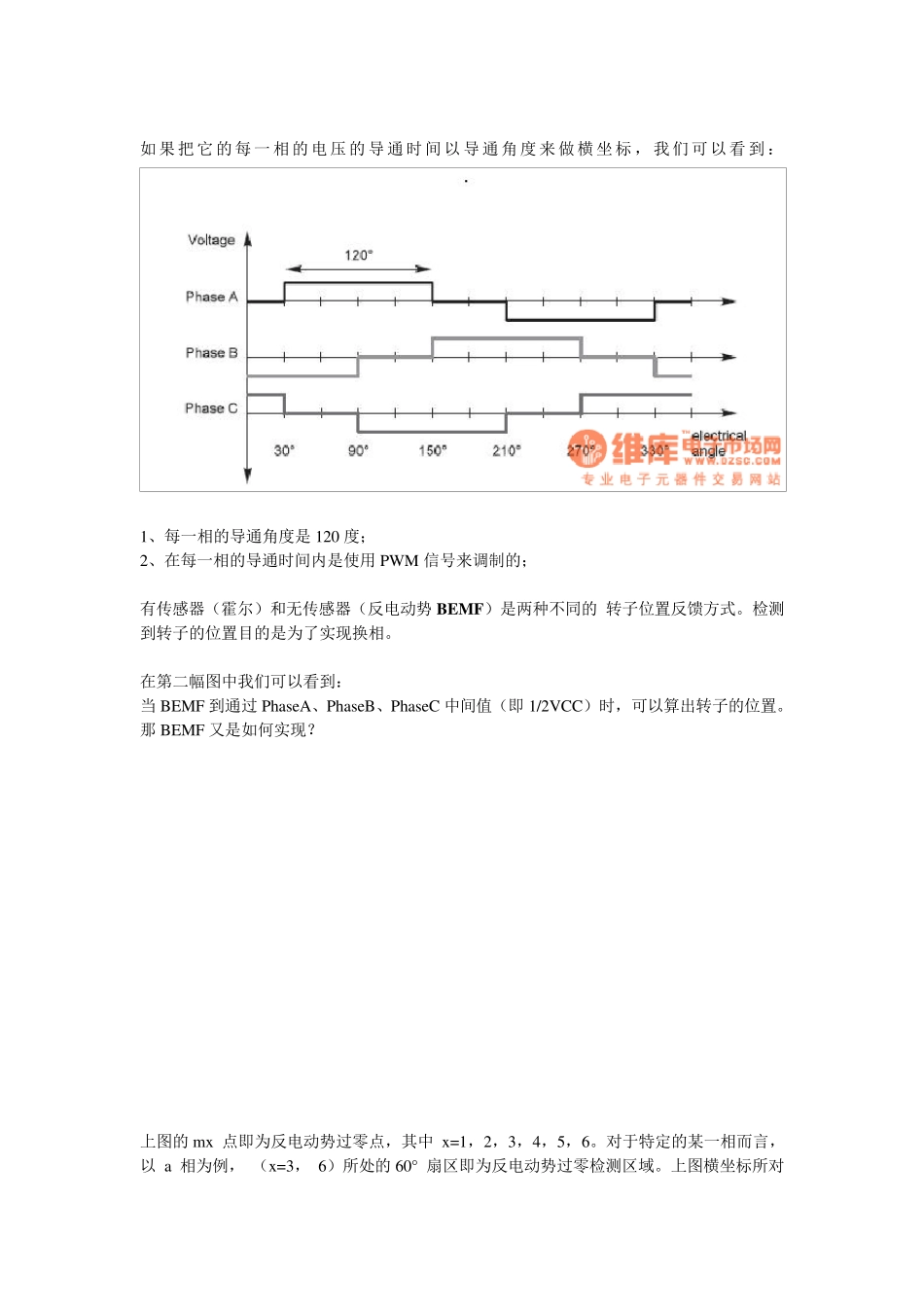
120 度驱动BLDC 和180 度驱动BLDC 的区别 通常对于BLDC 所说的6 步法驱动: 下图是一个简单的BLDC 马达六步法的简单示意图: 按照六步法的每个相的导通次序,我们可以得到每个开关的导通时序: 如果把它的每一相的电压的导通时间以导通角度来做横坐标,我们可以看到: 1、每一相的导通角度是 120 度; 2、在每一相的导通时间内是使用 PWM 信号来调制的; 有传感器(霍尔)和无传感器(反电动势 BEM F)是两种不同的 转子位置反馈方式
检测到转子的位置目的是为了实现换相
在第二幅图中我们可以看到: 当 BEMF 到通过 PhaseA、PhaseB、PhaseC 中间值(即 1/2VCC)时,可以算出转子的位置
那 BEMF 又是如何实现
上图的mx 点即为反电动势过零点,其中 x=1,2,3,4,5,6
对于特定的某一相而言,以 a 相为例, (x=3, 6)所处的60° 扇区即为反电动势过零检测区域
上图横坐标所对应的电压为半电压uN
这样我们可以知道: 1
反电动势过零点超前于实际换相点 30° 2
一个电周期内,任一相反电动势有两次过零 3
检测反电动势过零点等效于检测实际换相点(霍尔位置传感器) 4
反电动势检测可以简化为反电动势过零检测 这里需要注意的是:反电动势过零检测只是针对任意时刻没有通电的线圈(相/绕组)而言
下面这份图时 FREESCALE 给出的一个相压和 BEMF 的关联图: 对于 BEMF 的采样,有几种方法,传统的是使用 3 个电阻虚拟一个中性点,即虚地: 在PW M 导通期间, 中点的电压位HV/2
这样通过三个电阻与每个相线连接,然后连在一起,人为的创建一个虚地点
ST7MC 使用了另一种方式: 这样做的好处
看上面的两种图啊
180 度驱动BLDC 120 度和180 度的区别在与其推动每一相的导通