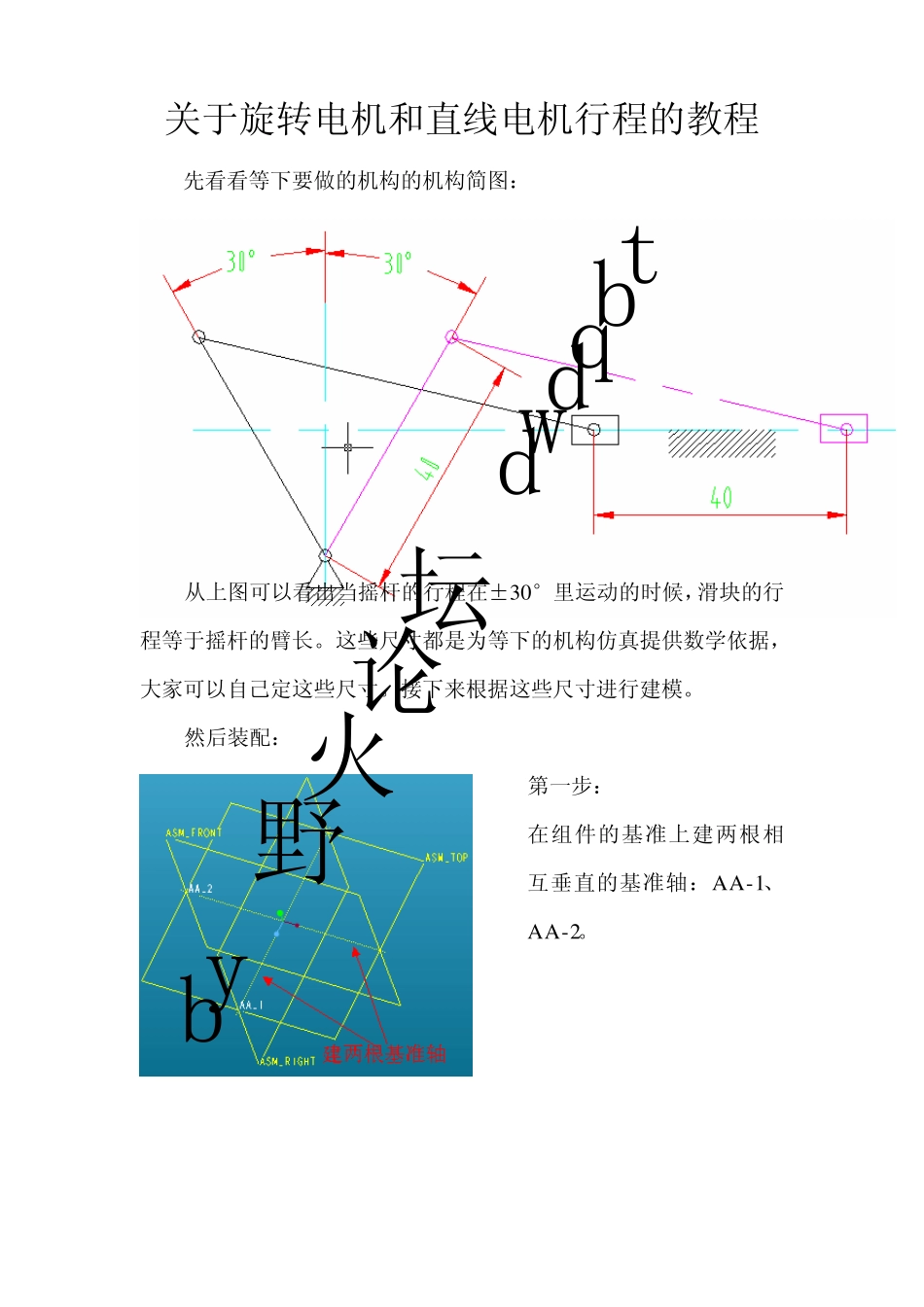
关于旋转电机和直线电机行程的教程 先看看等下要做的机构的机构简图: 从上图可以看出当摇杆的行程在±30°里运动的时候,滑块的行程等于摇杆的臂长
这些尺寸都是为等下的机构仿真提供数学依据,大家可以自己定这些尺寸
接下来根据这些尺寸进行建模
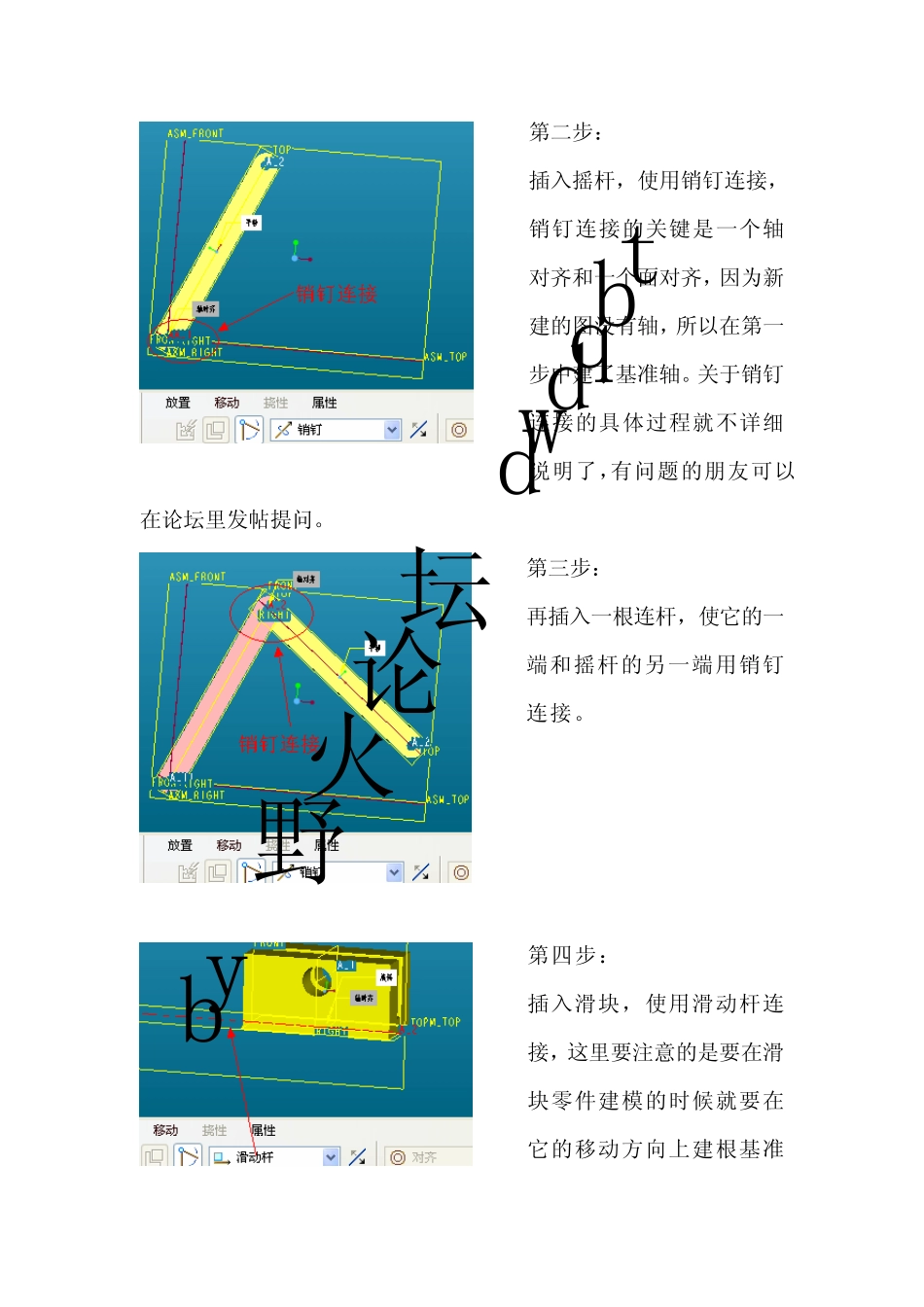
然后装配: 第一步: 在组件的基准上建两根相互垂直的基准轴:A A -1、A A -2
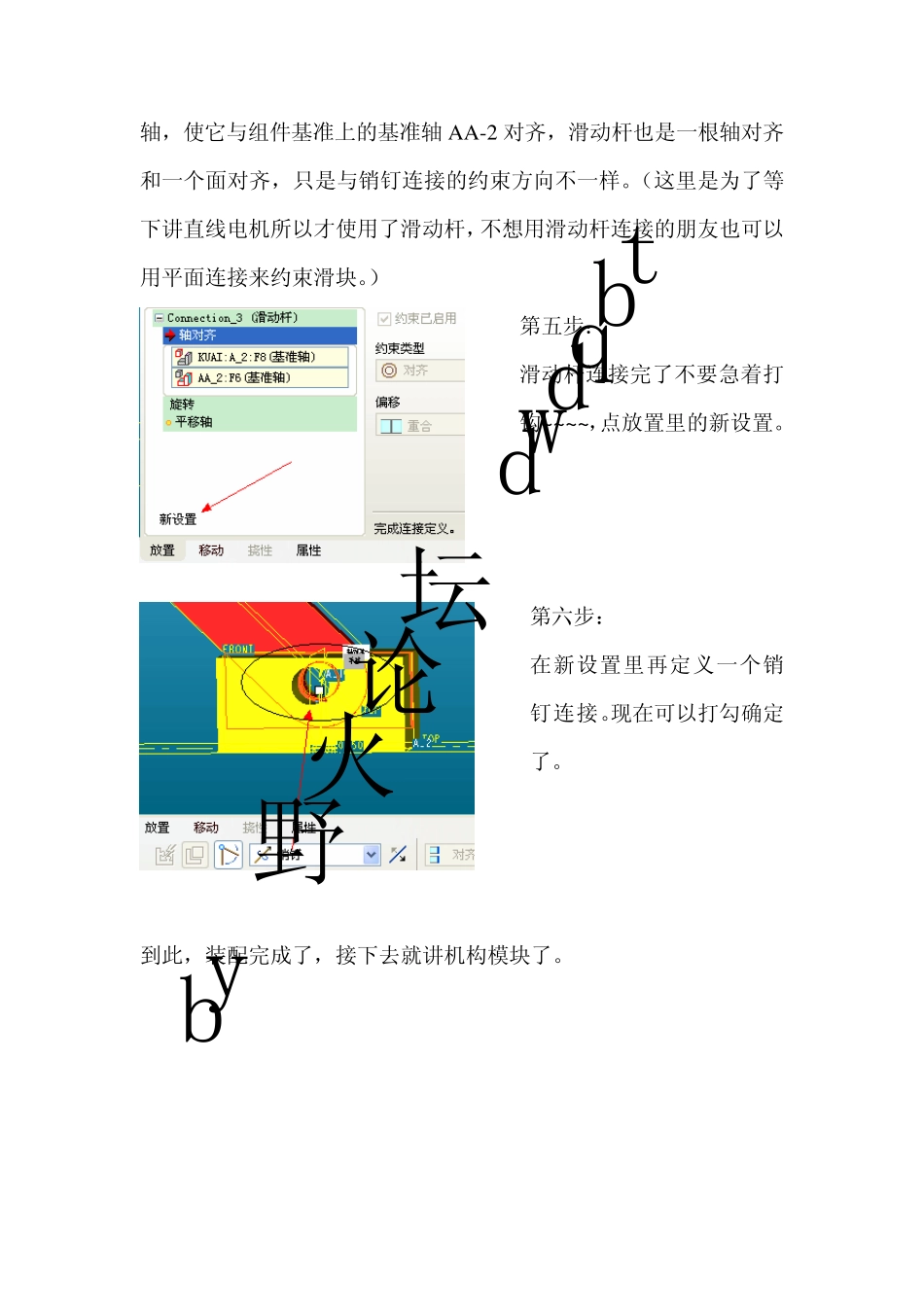
by 野火论坛 dwdqbt第二步: 插入摇杆,使用销钉连接,销钉连接的关键是一个轴对齐和一个面对齐,因为新建的图没有轴,所以在第一步中建了基准轴
关于销钉连接的具体过程就不详细说明了,有问题的朋友可以在论坛里发帖提问
第三步: 再插入一根连杆,使它的一端和摇杆的另一端用销钉连接
第四步: 插入滑块,使用滑动杆连接,这里要注意的是要在滑块零件建模的时候就要在它的移动方向上建根基准by 野火论坛 dwdqbt轴,使它与组件基准上的基准轴AA-2 对齐,滑动杆也是一根轴对齐和一个面对齐,只是与销钉连接的约束方向不一样
(这里是为了等下讲直线电机所以才使用了滑动杆,不想用滑动杆连接的朋友也可以用平面连接来约束滑块
) 第五步: 滑动杆连接完了不要急着打钩~~~~,点放置里的新设置
第六步: 在新设置里再定义一个销钉连接
现在可以打勾确定了
到此,装配完成了,接下去就讲机构模块了
by 野火论坛 dwdqbt第一步: 当然是进入机构模式了
第二步: 加一个伺服电机,选第一个销钉连接为运动轴 by 野火论坛 dwdqbt第三步: 定义电机的轮廓 规范选位置,模选余弦,A 是最大行程的位置,根据前面的机构简图,这里填30,B 是相位,我们选的是余弦,而我们希望摇杆的行程是按正弦曲线变化,所以相位必须延迟或超前90,所以这里正负90 都是可以的,C 是初始位置,我们想要从逆时针90 度的位置开始,所以填90,T 是周期,我们选3 秒