定位控制的目的与用途 定位的定义 所谓定位控制,是指被加工品或工具等移动体以指定的速度移动,正确停靠于指定目标位置
定位控制装置由“指令部”、“控制部”、“驱动·检测部”3 个部分组成 控制器的作用是,发出使物体移动至目标位置所需的指令信号、并将其送至伺服放大器
伺服放大器向伺服电机提供所需的电力,以使伺服电机按照输入的指令信号作用
编码器读取伺服电机的旋转值,作为反馈信号传送给伺服放大器
伺服放大器检测指令信号和反馈信号的差值,若该值为零,则判定为按照指令工作
定位控制中使用的指令信号为脉冲信号,叫做“指令脉冲”
伺服电机就是按照定位单元向伺服放大器发送的指令脉冲的个数转动的
此外,单位时间内的指令脉冲数叫做“指令脉冲频率”,用于控制伺服电机的转速
指令脉冲个数,用于控制定位的位置
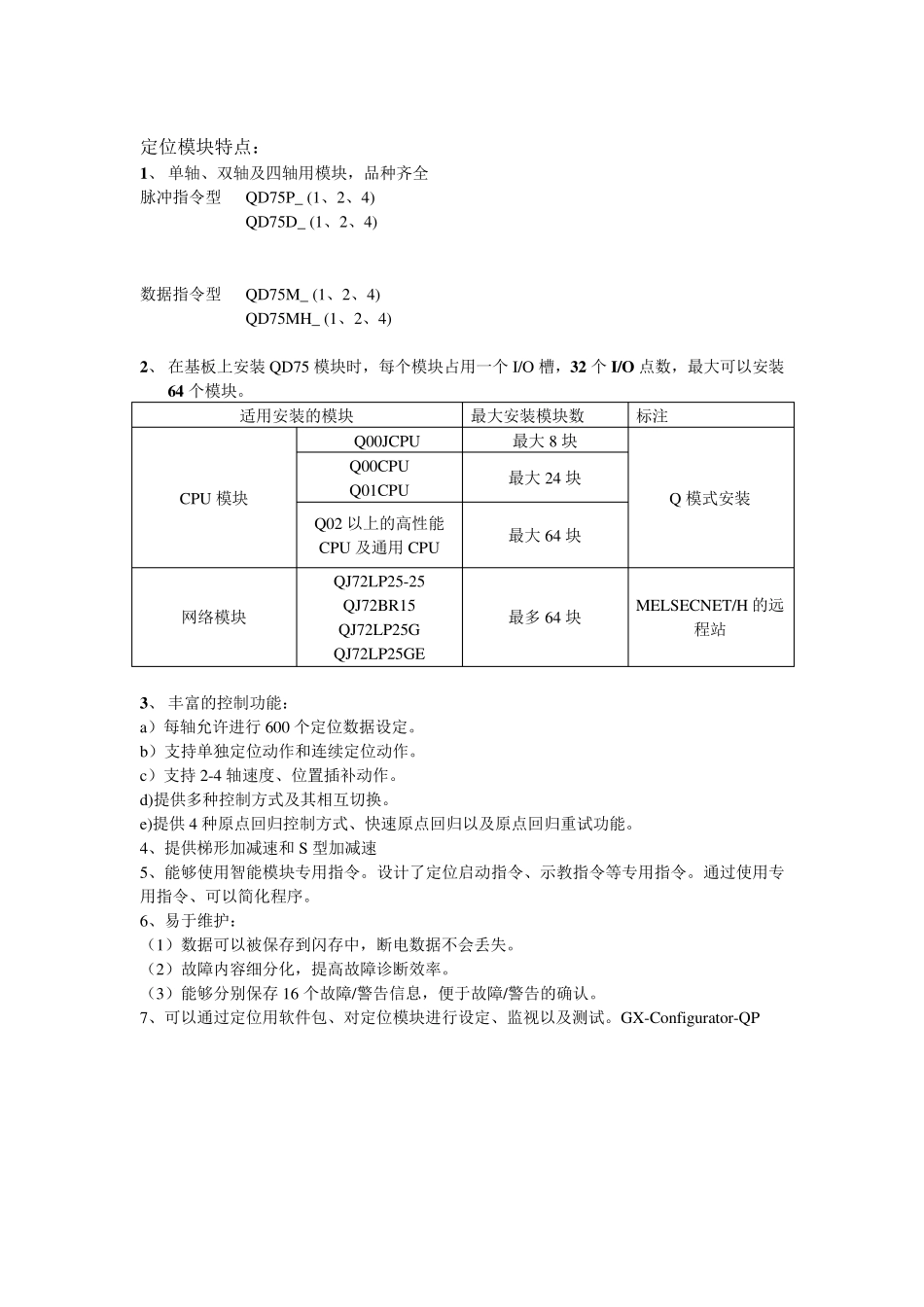
定位模块特点: 1、 单轴、双轴及四轴用模块,品种齐全 脉冲指令型 QD75P_ (1、2、4) QD75D_ (1、2、4) 数据指令型 QD75M_ (1、2、4) QD75MH_ (1、2、4) 2、 在基板上安装 QD75 模块时,每个模块占用一个 I/O 槽,32 个 I/O 点数,最大可以安装64 个模块
适用安装的模块 最大安装模块数 标注 CPU 模块 Q00JCPU 最大 8 块 Q 模式安装 Q00CPU Q01CPU 最大 24 块 Q02 以上的高性能CPU 及通用 CPU 最大 64 块 网络模块 QJ72LP25-25 QJ72BR15 QJ72LP25G QJ72LP25GE 最多 64 块 MELSECNET/H 的远程站 3、 丰富的控制功能: a)每轴允许进行 600 个定位数据设定
b)支持单独定位动作和连续定位动作
c)支持 2-4 轴速度、位置插补动作
d)提供多种控制方式及其相互切换
e)提供 4 种原点回归控制方式、快速