刘宏娟 SIFT 算法小结 David
Lowe,总结了现有的基于不变量技术的特征检测方法,正式提出了一种基于尺度空间的,对图像平移、旋转、缩放、甚至仿射变换保持不变性的图像局部特征,以及基于该特征的描述符
并将这种方法命名为尺度不变特征变换(Scale Invariant Feature Transform),简称SIFT 算法
①SIFT 主要思想 SIFT算法是一种提取局部特征的算法,在尺度空间寻找极值点,提取位置,尺度,旋转不变量
②SIFT算法的主要特点: a) SIFT特征是图像的局部特征,其对平移、旋转、尺度缩放、亮度变化保持不变性,对对光照变化、视角变化、仿射变换、噪声也保持一定程度的稳定性
具有较强的鲁棒性
b) 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配,在特征匹配时可以以一个很高的概率正确匹配
c) 多量性,即使少数的几个物体也可以产生大量SIFT特征向量,这对于目标识别非常重要
d) 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求
e) 可扩展性,可以很方便的与其他形式的特征向量进行联合
③SIFT 算法步骤: 1)检测尺度空间极值点 2)精确定位极值点,得到关键点,并确定关键点的位置和所处的尺度 3)为每个关键点指定方向参数(使用极值点邻域梯度的主方向作为该关键点的方向特征,以实现算子对尺度和方向的无关性) 4)关键点描述子的生成 利用SIFT 算法从图像中提取出的特征可用于同一个物体或场景的可靠匹配
④SIFT 算法的原理 ▲尺度空间的生成 尺度空间理论目的是模拟图像数据的多尺度特征
(为了使特征具有尺度不变性,特征点的检测是在多尺度空间完)成的
尺度空间理论最早出现于计算机视觉领域时,其目的是模拟图像数据的多尺度特征
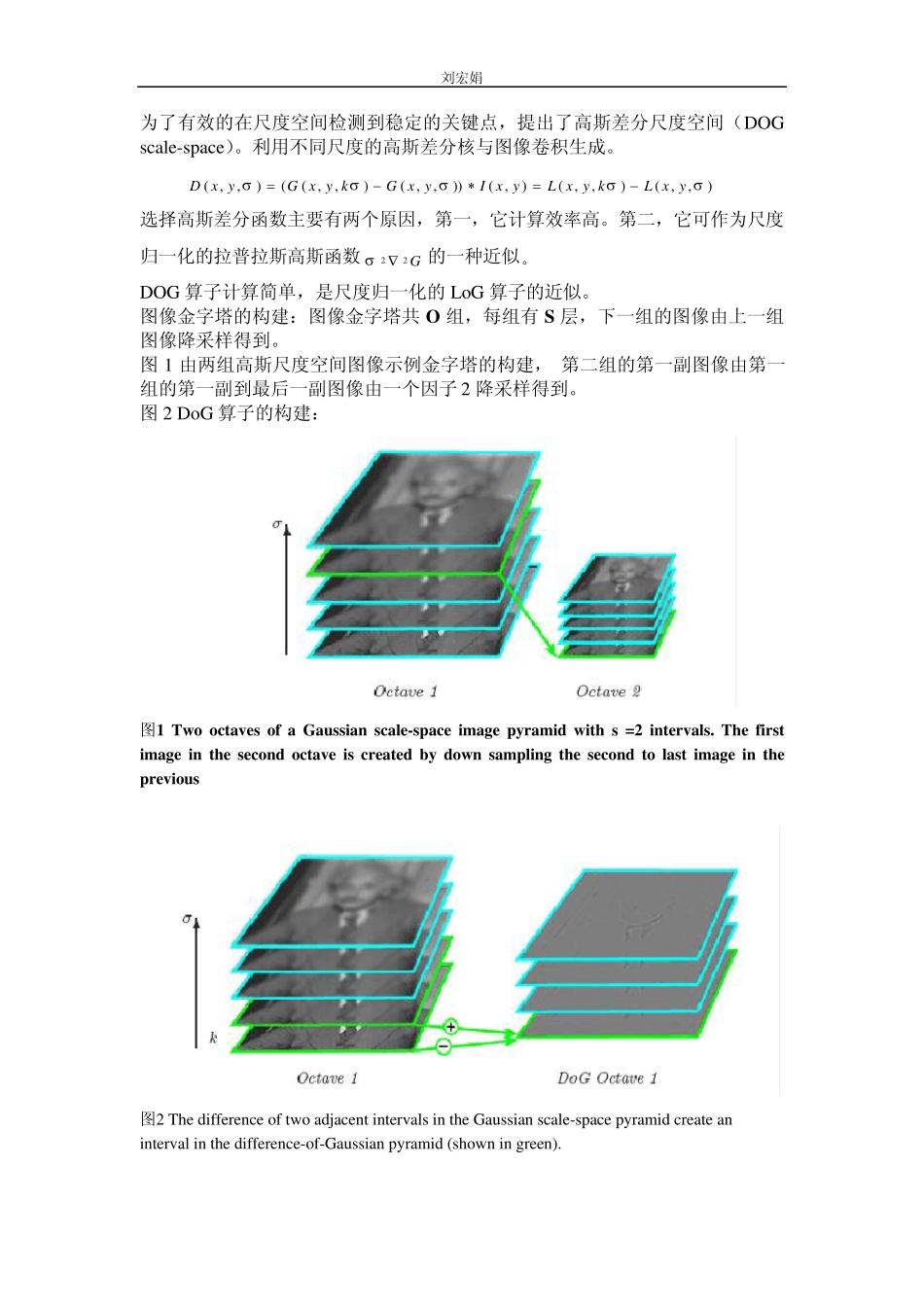
高斯卷积核是实现尺度变换的唯一变换核,并且是