乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程
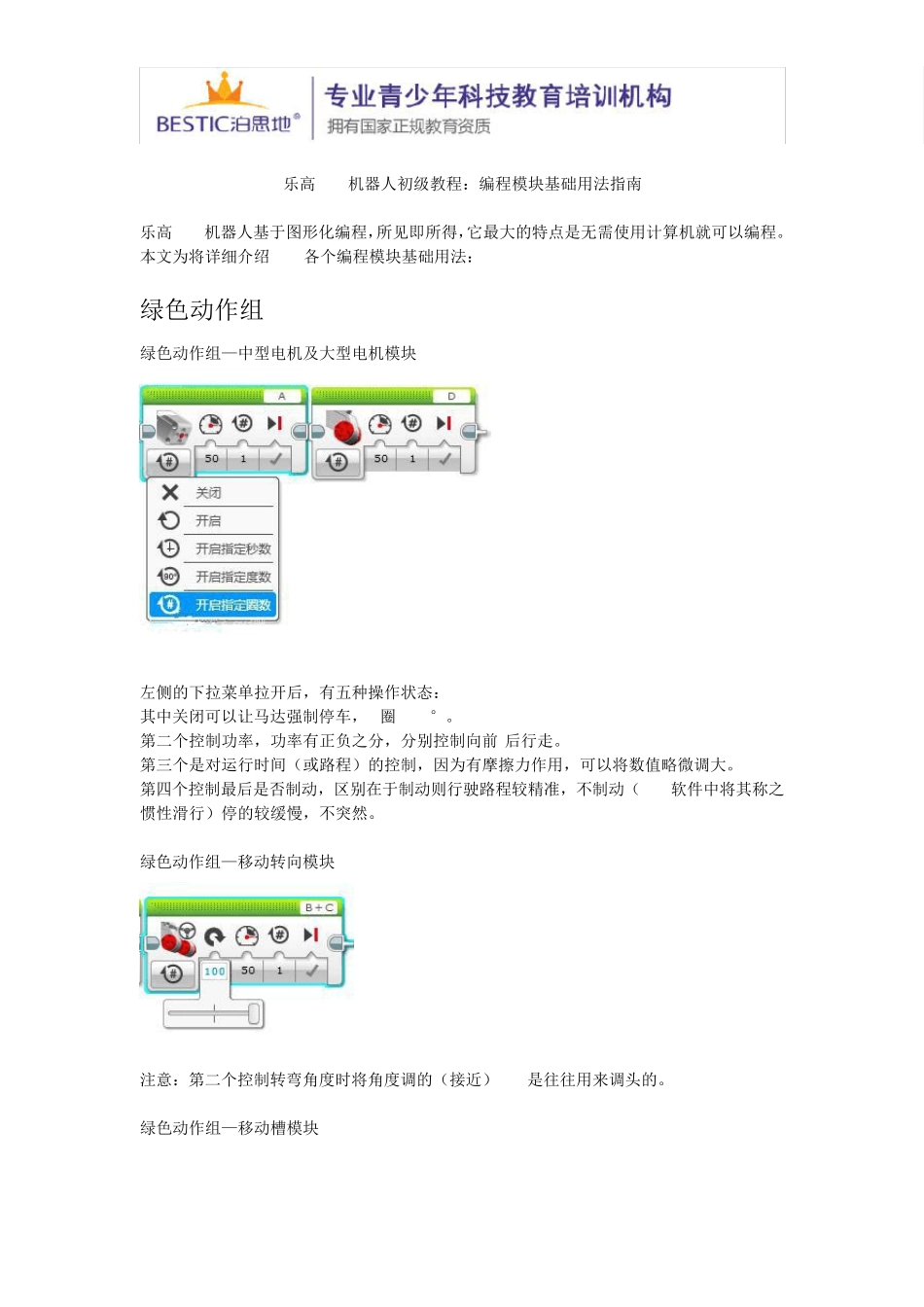
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°
第二个控制功率,功率有正负之分,分别控制向前/后行走
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕
大写的 X和 Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上
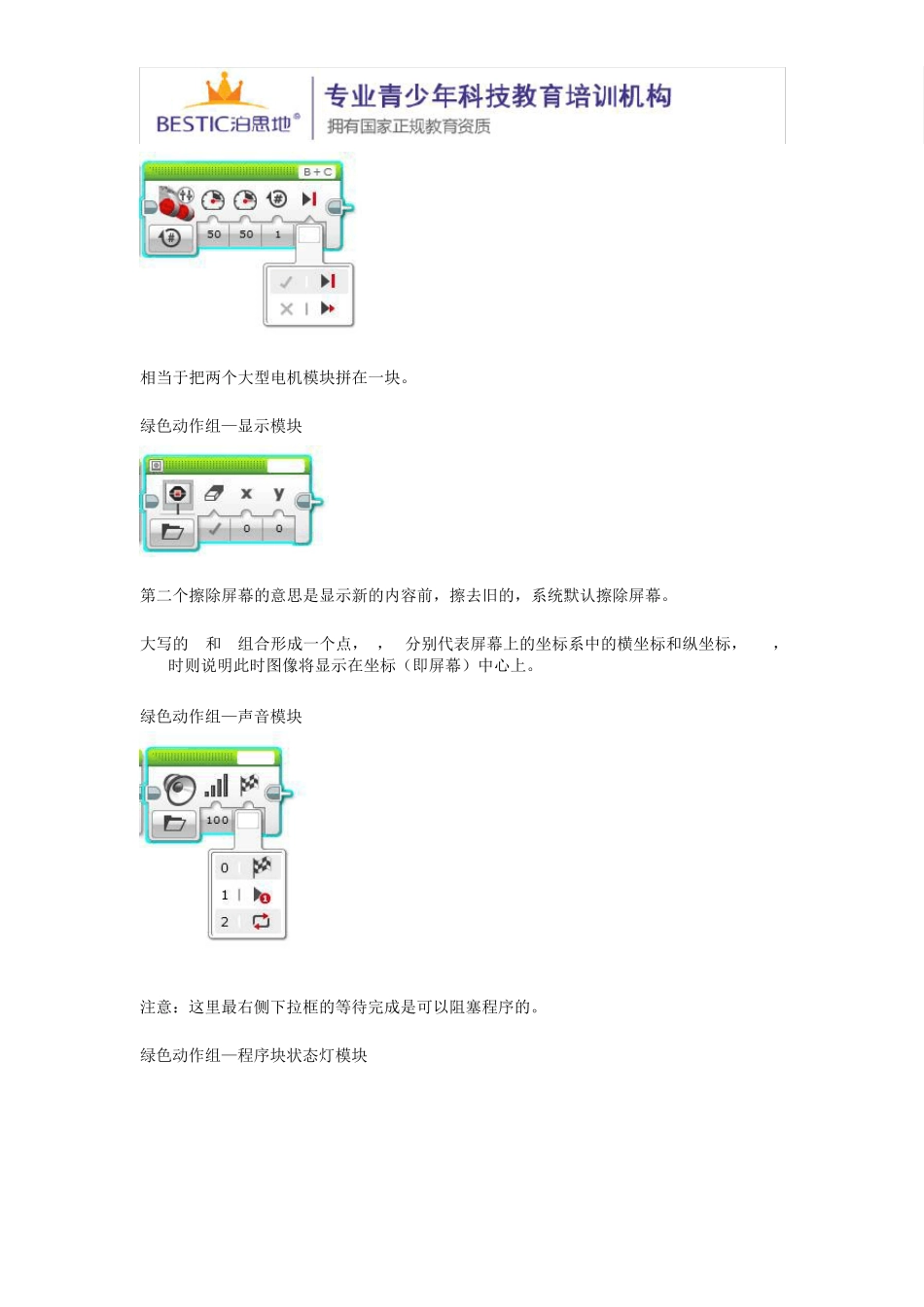
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁
橙色流程控制组橙色流程控制组—开始模块在将 EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序
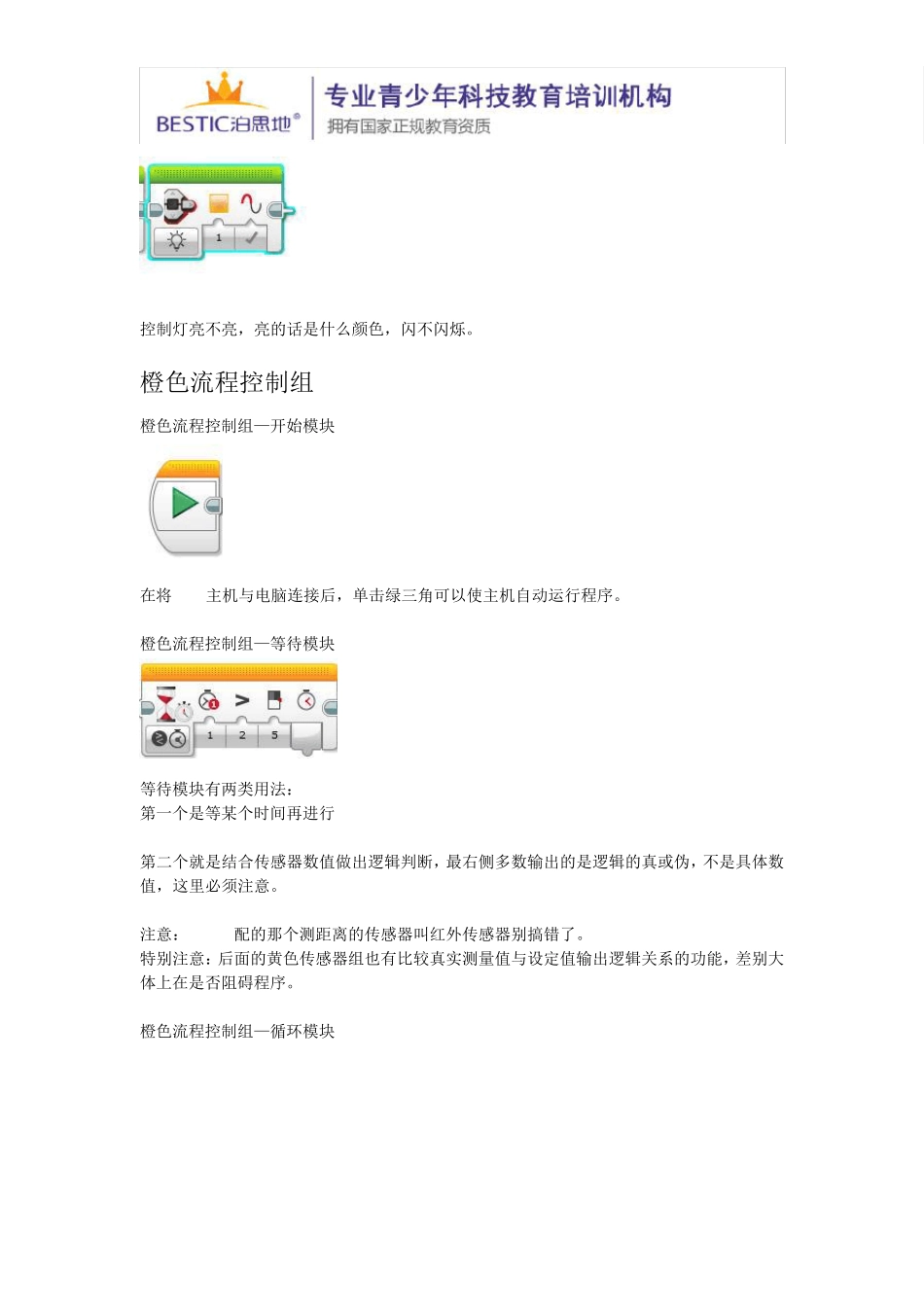
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意
注意:31313配的那个测距离的传感器叫红外传感器别搞错了
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行
时间和计数退出就是到了就自动退出
逻辑退出:假如事先设定