1 2015 年全国职业院校技能大赛 工业机器人技术应用赛项(高职组) 竞赛任务书(样题) 选手须知: 1
任务书共 16 页,另有电路图附件一份,如出现任务书缺页、字迹不清等问题,请及时向裁判示意,并进行任务书的更换
竞赛任务完成过程配有两台笔记本计算机,参考资料放置在“D:\参考资料”文件夹下
参赛团队应在 4
5 小时内完成任务书规定内容;选手在竞赛过程中创建的程序文件必须存储到“D:\技能竞赛\工位号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分
选手提交的试卷用赛位号标识,不得出现学校、姓名等与身份有关的信息,否则成绩无效
由于错误接线、操作不当等原因引起机器人控制器及 I/O 组件、智能视觉系统、PLC、变频器、AGV 机器人的损坏,将取消选手竞赛资格
在完成任务过程中,请及时保存程序及数据
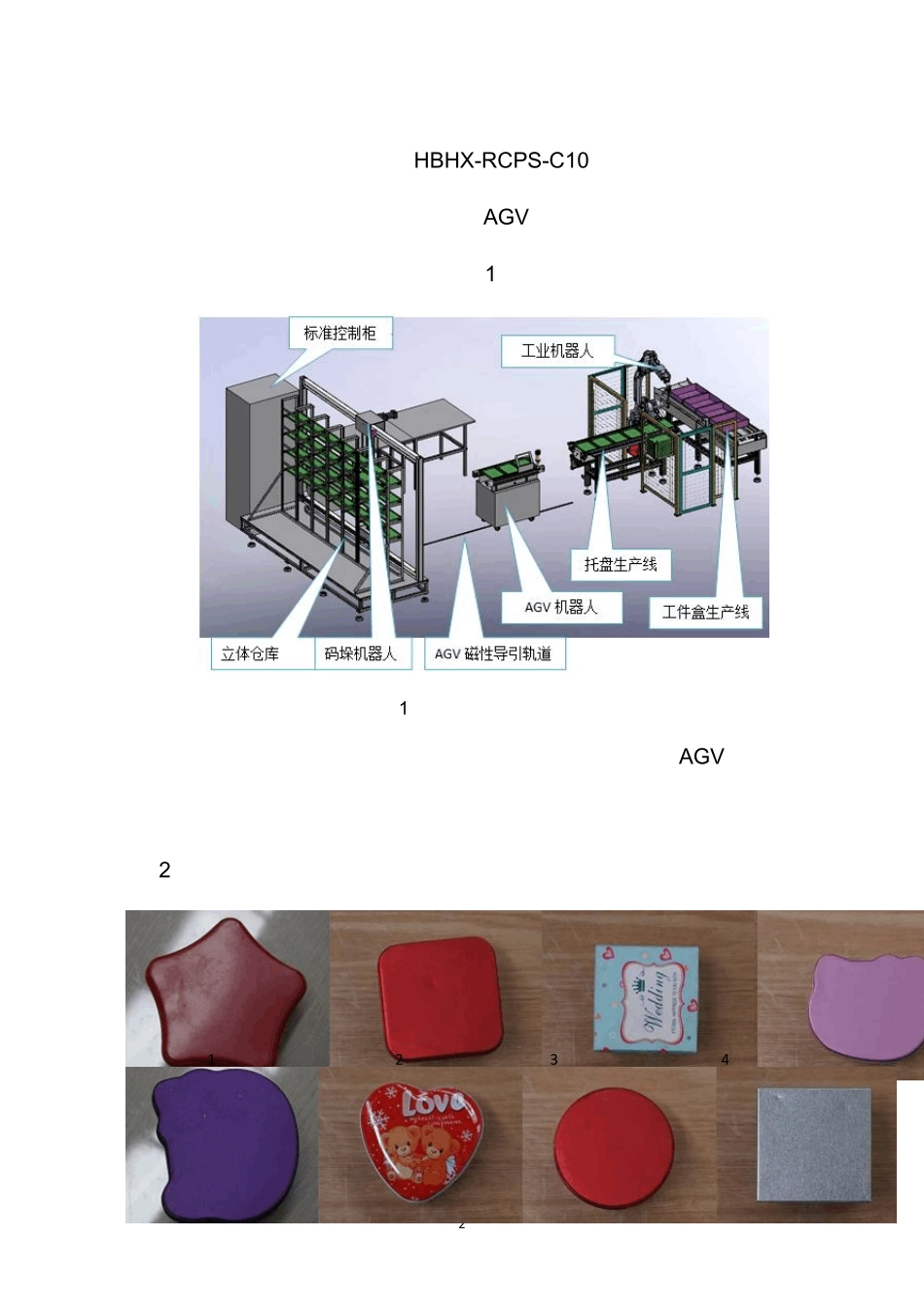
批次: 日期: 赛位号: 2 竞赛设备描述: “工业机器人技术应用”竞赛在“HBHX-RCPS-C10 型 工业机器人技术应用实训平台”上进行,该设备由工业机器人、AGV 机器人、托盘生产线、工件盒生产线、视觉和立库等六大系统组成,如图 1 所示
图 1 竞赛平台结构图 系统的主要工作目标是将从立体仓库上取出的工件,通过 AGV 机器人,搬运到托盘生产线上,通过视觉系统对工件进行识别,然后由工业机器人进行装箱
图 2 是需要分拣的工件
1 2 3 4 3 5 6 7 8 图 2 需要分拣的工件 图 2 中默认从左至右、从上到下工件编号为 1-8 号
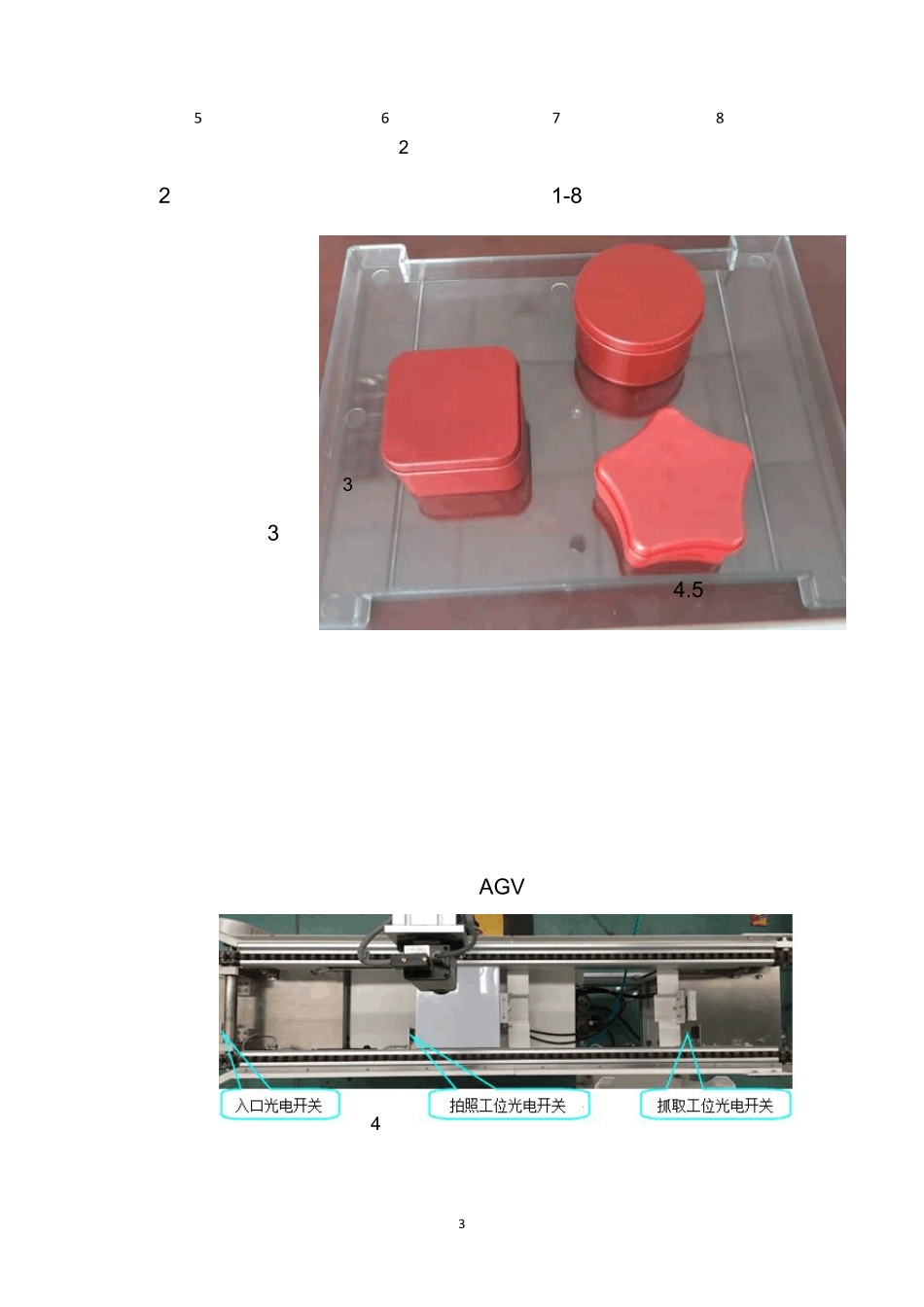
图 3 分拣工件放置于托盘中的状态 托盘结构如图 3 所示,两侧设计有档条,两条档条中间为工件放置区
以下为本次竞赛的各项任务,请选手根据竞赛任务书,在 4
5 个小时内,完成竞赛设备部分硬件安装、智能相机系统调试、工业机器人示教编程、人机界面开发、控制程序编写及系