KUKA 机器人安全操作手册当您拿到这份安全操作手册时请引起您的足够重视,请以仔细负责的态度阅读本说明书中的任何一项条款。您所接触到的...
一、安全.............................................................................................................................

KUKA 机器人由机械手和控制柜组成,每日保养包含机器人、控制箱、教导盒、手腕之表面擦拭,还有噴之清洁。一, KUKA 机器人控制柜保养 1...
KUKA 机器人 krc 系统操作与编程手册 编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理...

KUKA 机器人焊枪设置CompanyDocumentnumber:WTUT-WT88Y-W8BBGB-BWYTT-19998[mernet 檢优,^卒 4fTC^/IPv^匱性S1 设置电脑 IP 地址与 ...

1. 首先拆开肯比焊机的上盖~找到DeviceNet Connector 其接口数据如下表格 引脚 信号 描述 1 V- 0V 2 Can_L 低频 3 SHIELD ...
精品文档---下载后可任意编辑KUKA 双频共用船载天线伺服跟踪系统设计及实现的开题报告摘要:本文主要介绍了一种 KUKA 双频共用船载天线...

精品文档---下载后可任意编辑KUKA 双频段小口径天线设计的开题报告标题: KUKA 双频段小口径天线设计一、选题背景随着无线通信技术的不...

一、单项选择题(本大题共 2 0 小题。每小题1 分,共 2 0 分) 1、 下列外部自动输出端RK9 的含义 ( D ) A、编程运行 B、...
KUKA机器人编程手册
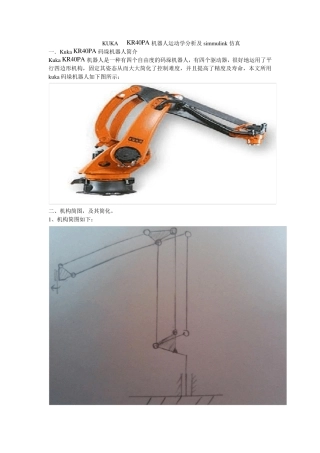
KUKA KR40PA 机器人运动学分析及simmulink 仿真 一.KUKA KR40PA 码垛机器人简介 KUKA KR40PA 机器人是一种有四个自由度的码垛机...

1KUKA机器人调试标准化作业指导书一校各轴零点�本体轴预校正位置T2 模式下将待校正轴移到预校正位置。白线标记位于机器人上的下列位置:...
KUKA机器人编程3(共3册)

KUKA机器人程序命令

KUKA机器人用户编程

KUKA机器人激光焊大众标准

KUKA机器人焊接程序解析 CELL程序 DEF CELL ( ) INIT;初始化(折合) CHECK HOME;检测机器人是否在HOME位置(折合)PTP HOME V...
KUKA机器人初级编程

KUKA机器人手册样本

KUKA 机器人KRC2-KR3/KR6/KR16 开机调试步骤 STEP1 外接显示器/鼠标/键盘 显示器/鼠标/键盘接好后开机,选择冷启动,重新启动后正常。...