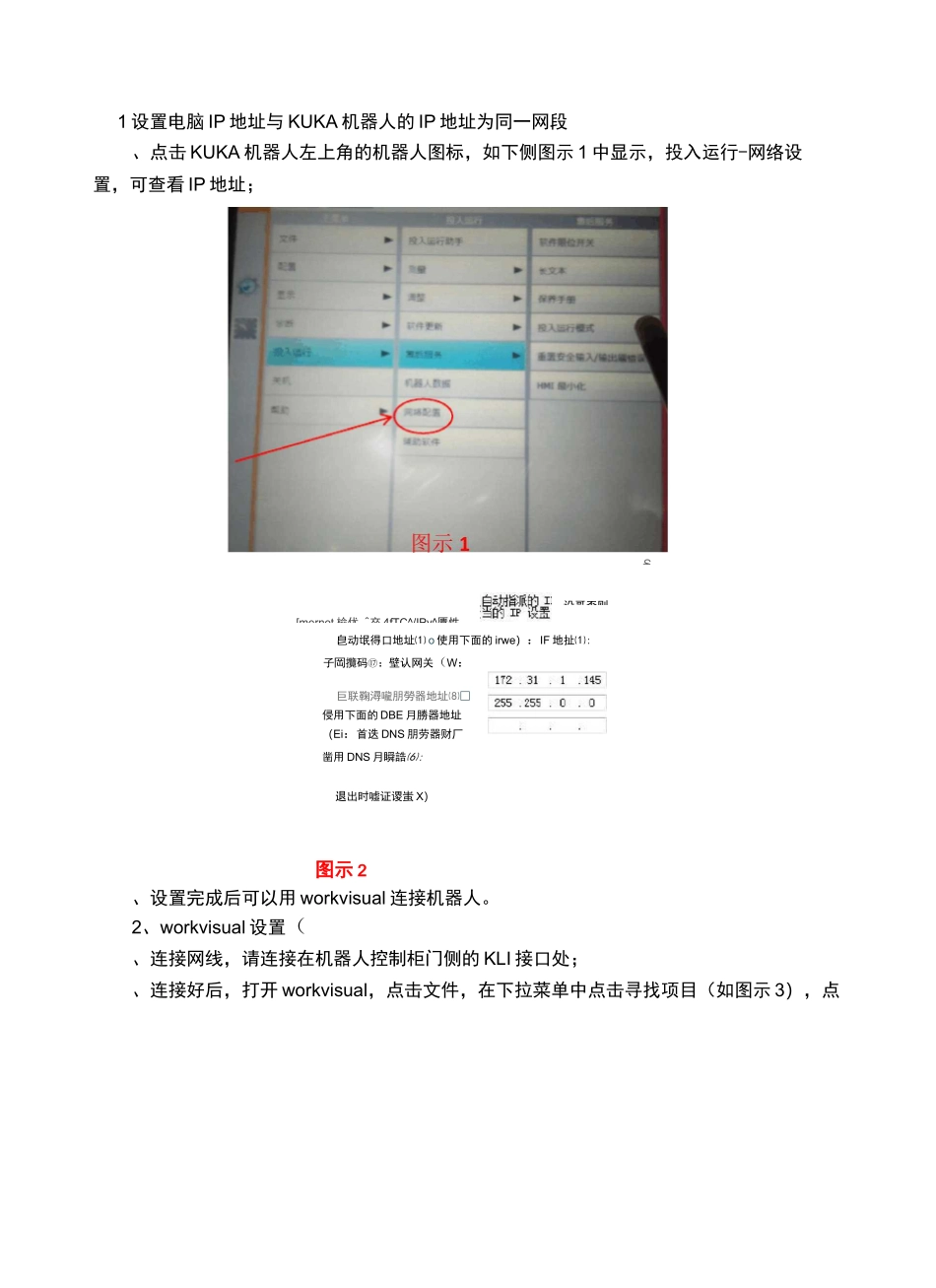
KUKA 机器人焊枪设置CompanyDocumentnumber:WTUT-WT88Y-W8BBGB-BWYTT-19998[mernet 檢优,^卒 4fTC^/IPv^匱性S1 设置电脑 IP 地址与 KUKA 机器人的 IP 地址为同一网段、点击 KUKA 机器人左上角的机器人图标,如下侧图示 1 中显示,投入运行-网络设置,可查看 IP 地址;皀动氓得口地址⑴ o 使用下面的 irwe):IF 地扯⑴:子岡攬码⑰:壁认网关(W:巨联鞠潯嚨朋勞器地址⑻□侵用下面的 DBE 月勝器地址(Ei:首迭 DNS 朋劳器财厂凿用 DNS 月瞬誥⑹:退出时噓证谡蚩 X)图示 2、设置完成后可以用 workvisual 连接机器人
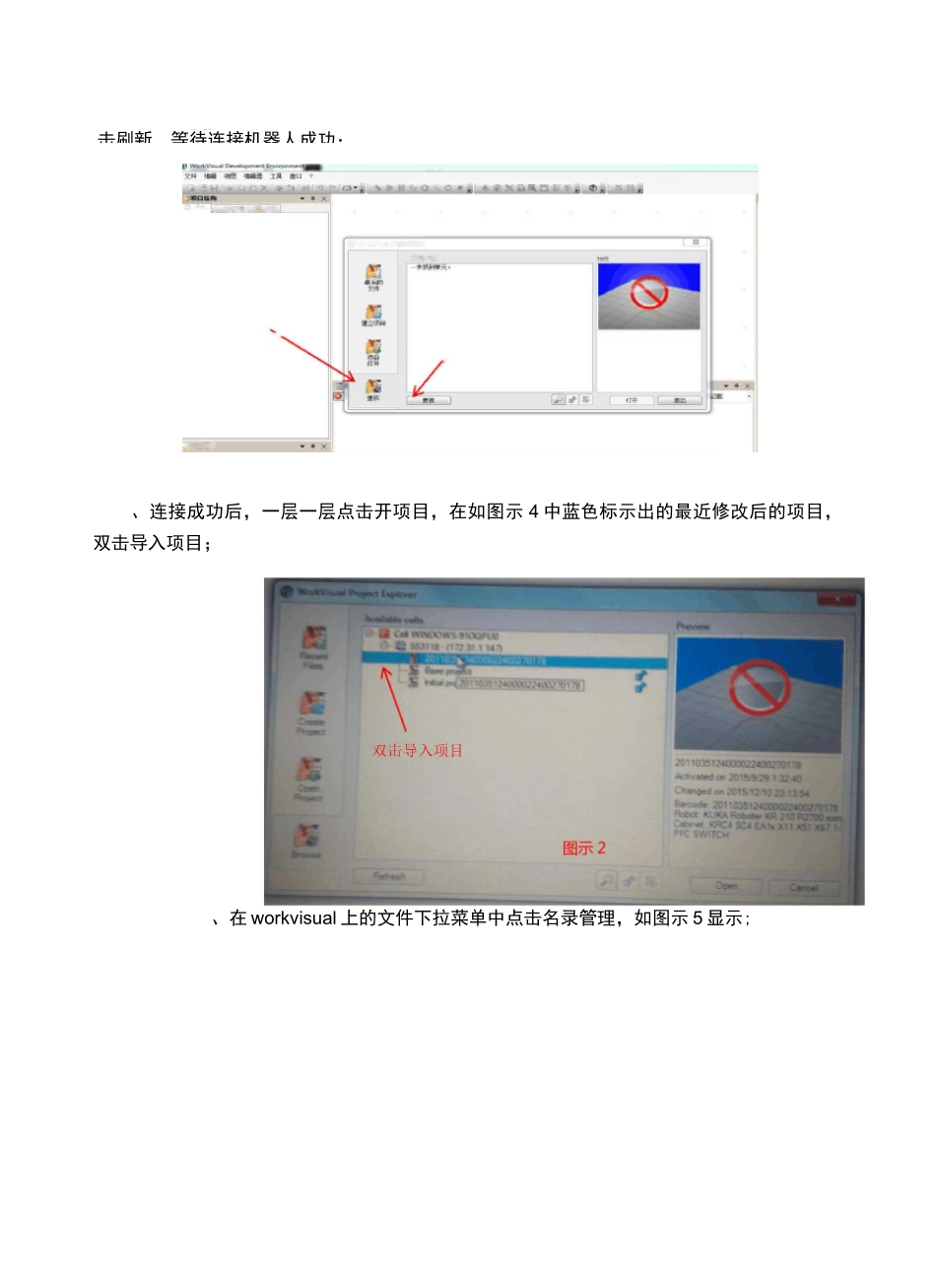
2、workvisual 设置(、连接网线,请连接在机器人控制柜门侧的 KLI 接口处;、连接好后,打开 workvisual,点击文件,在下拉菜单中点击寻找项目(如图示 3),点设哥否则,击刷新,等待连接机器人成功;点击刷■工・酬詐说*,AFLHIJUXIistt图示巒 Wf^Wwai 卿 lim寻找项目对话框可用力*、连接成功后,一层一层点击开项目,在如图示 4 中蓝色标示出的最近修改后的项目,双击导入项目;、在 workvisual 上的文件下拉菜单中点击名录管理,如图示 5 显示;点击打文HTTWhi3KRLTennpiatc-53CttmC-ntalag3KjukiDrivEKjne-rnaljcs3KjjImCDntrdben:4Kuka&ri^s|3KukaRobots'4KukAExtsnidlKjrwrYiate-51
3KukaRDbotsiSflV'ji 也上拄进曰皿临“閒出“230#Q3Kuka
ftcbct544OV3KuXE 旳 imallGnAfviEiwH 就 lb卫 Kuka
R&boti4BavA