第7期2012年7月组合机床与自动化加工技术ModularMachineTool&AutomaticManufacturingTechniqueNo.7Jul.2012文章编号:1001-2265(2012)07...

附件2机器人搬运挑战赛规则一.任务参赛队要设计一个能自主控制的机器人,机器人在既定的场地中从基地出发,到达目标区将代表货物的橙色乒...
南京理工大学硕士学位论文基于Voronoi图的机器人局部路径规划姓名:赵永利申请学位级别:硕士专业:模式识别与智能系统指导教师:陆建峰200...

直角坐标机器人及运动控制系统Csumtech2012
24果园机器人预习卡知识连接:机器人机器人技术作为20世纪人类最伟大的发明之一,从60年代初问世以来,经历四十多年的发展已取得长足的进步...

没有机器人,人将变为机器随着社会的发展,社会分工越来越细,尤其在现代化的大生产中,有的人每天就只管拧同一个部位的一个螺母,有的人整...

从生物学的角度上来讲,一般是把虾、蟹、昆虫等从生物学的角度上来讲,一般是把虾、蟹、昆虫等节肢动物节肢动物体表坚韧的几丁质的骨骼称为...
一、机器人系统集成介绍1•机器人工业化模式工业机器人系统集成商处于机器人产业链的下游应用端,为终端客户提供应用解决方案,其负责工业...

机器人运动学2005年3月24日运动学正问题杆件参数的意义坐标系的建立原则杆件坐标系间的变换过程-相邻关节坐标系的齐次变换机器人的...
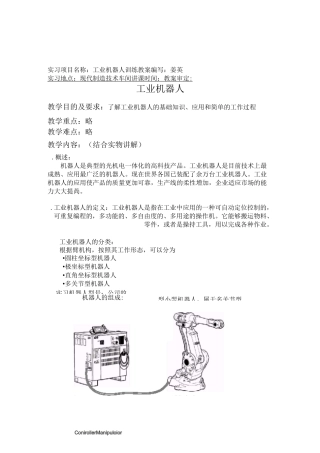
ConirollerManipuloior.实习机器人型号:公司的型小翌机器人,属于多关节型实习项目名称:工业机器人训练教案编写:姜英实习地点:现代制造...
机器人视觉(RobotVision)简介机器视觉系统的组成机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识...
![[机器人软件架构]使用分层的方法设计机器人软件](https://file.xiaomilidoc.com/convert/202412/23/5288233/thumb-P1-b0c76e38-868d-411f-a1f6-6d4fdc2c6580-320x453.webp)
[机器人软件架构]使用分层的方法设计机器人软件目录1.驱动层2.平台层3.算法层4.用户接口层机器人软件架构是典型的控制回路的层次集,包含了...

©ABBGroupDecember23,2024|Slide1The#1RobotController卓越的机器人控制器IRC5Overview简介©ABBGroupDecember23,2024|Slide2Fromthefirst...

图1.1Delta并联机器人本体与控制柜1.控制系统设计在前面机械系统的基础上,要想实现机器人的抓取操作,还必须有控制系统1.1控制系统方案...

地面固定安装机器人底座结构尺寸规范指南1.范围本规范规定了本公司销售和使用的机器人的安装底座结构与尺寸的一般性要求。包括设计、加工及...

•爱普生机器人概述•机器人核心技术•机器人编程与实践•机器人应用领域拓展•总结与展望contents目录机器人的定义与发展定义发展历程爱普...
•机器人学概述•机器人编程基础•机器人运动学•机器人动力学目录•机器人感知与感知技术•机器人控制技术•机器人应用案例分析什么是机器...

陆空两栖机器人建模与仿真课件•陆空两栖机器人概述•陆空两栖机器人建模•陆空两栖机器人仿真•陆空两栖机器人控制算法•陆空两栖机器人实...

•工业机器人概述•工业机器人运动学•工业机器人逆运动学实现方法•工业机器人轨迹规划•工业机器人控制系统及编程语言•工业机器人应用案...

机器人现场编程-as语言示教-立体码垛编程课件CONTENTS•课程介绍•机器人基础知识•立体码垛应用场景与工艺流程•码垛程序编写与调试•码垛...