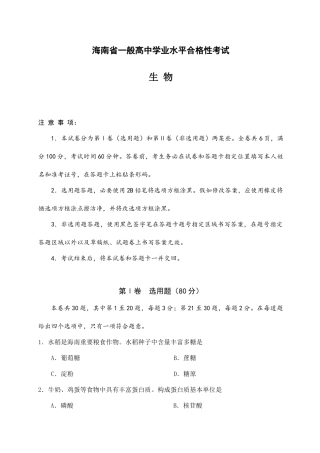
机器人采果实对抗赛规则比赛主题:随着农业机械化和自动化的发展,农产品的种植和收获变得越来越高效。或许在未来的某一天,农民伯伯的果园...

无线网络音视频采集机器人平台比赛编号:A377日期:2007-1-6单位:南京大学电子科学与工程系参赛者情况:(1)姓名:刘虎职业:在校本科生...

機器人設定參考手冊安裝無線網路:硬體安裝請參考說明書。軟體設定:與說明書上雷同,此處以D-LinkDI-624S為範例1.””在瀏覽器的網址欄位...
湘潭大学兴湘学院毕业设计说明书题目:小型清扫机器人控制部分设计学院:兴湘学院专业:机械制造及其自动学号:2007964217姓名:江培指导教...

作者:TomHarris(本文为博闻网版权所有,未经许可禁止以任何形式转载或使用。违者必究。)推荐到:本文包括:1.1.引言2.2.移动型机器人3.3....
机器人技术与系统国家重点实验室开放研究基金课题申请书课题名称:___________________________________________申请者:_________________...
清湖小学机器人比赛捷报频传2010年3月27日,我校机器人足球代表队参加“第九届深圳市青少年机器人大赛”。经过三场比赛,我校足球队与福永...
类人机器人套件介绍1.专家版专门为学生和研究者以及机器人爱好者开发的高级机器人套件。结合了行为仿真、通讯(UART、IR、ZigBee)、图像辨...

国外工业机器人厂商调研1国外工业机器人发展概况工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代...
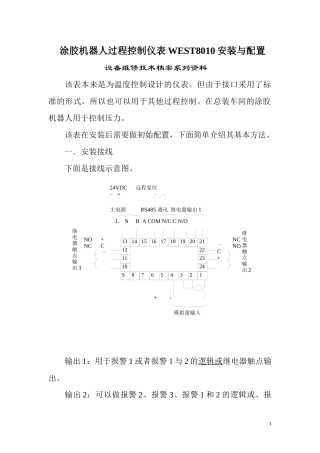
131415161718192021222324129876543121110LNBACOMN/CCN/O主电源RS485通讯继电器输出124VDC远程复位-+一C+NCNO继电器触点输出2NONC继电器触...
工业机器人设计(论文)题目:自动往返小车姓名:学号:班级:平顶山工业职业技术学院年月日目录第1章电动小车的改进方案....................
挑战题B:机器人教育重点:结构工程学、机器人技术、调研、技术设计及构建、科学、舞台艺术及团队合作。目的地:此挑战带领你所到之地!机...

2018年全国职业院校技能大赛拟设赛项规程一、赛项名称赛项编号:ZZ-2018014赛项名称:机器人技术应用英语翻译:RobotTechnologiesApplicati...
北京诺博康科技有限公司============================================================================================================...
毕业设计(论文)题目智能机器人灭火功能的实现系别专业班级学生姓名学号指导教师年月智能机器人灭火功能的实现摘要:智能灭火机器人系统控...
胡业明07食工5机器人概论课程说明书摘要在当今大规模制造业中,企业为提高生产效率,保障产品质量,工业机器人作为自动化生产线上的重要成...
一、机器人擂台赛1、实训目的机器人擂台赛的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内...

《让机器人动起来》教学设计顺德区北滘镇林头小学麦盛维一、设计思想以机器人实践活动为学习活动方式,通过图形化的编程降低学生学习算法与...

工学学士论文摘要摘要随着科技的发展,机器人越来越广泛的应用于工业和生活。本课题是工业机器人遥操作控制系统设计之嵌入式伺服控制器的设...
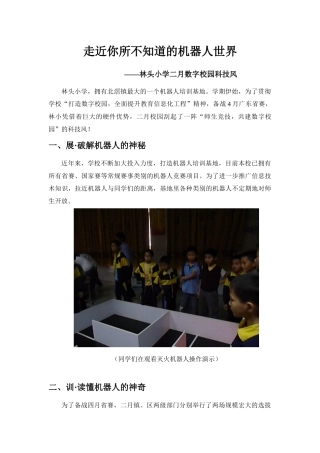
走近你所不知道的机器人世界——林头小学二月数字校园科技风林头小学,拥有北滘镇最大的一个机器人培训基地。学期伊始,为了贯彻学校“打造...