工程设备 CAN总线控制系统设计 1 引言 工程设备的数字化、信息化及施工管理一体化是当前工程设备的发展热潮,自20 世纪 90 年代始,发达国家的制造业就已经开始进行相关技术的探索,高新技术大量应用于先进的工程设备设计中
同时,以微计算机为代表的智能控制器被大量采用,智能节点间的信息流量空前增加
将车载电子设备按照一定的协议联网,并加以有效地信息综合,使之达到资源和功能的共享已成为发展趋势
现场总线技术是指把单个分散的测量控制设备变成网络节点,以现场总线为纽带,把它们连接成可以相互沟通讯息、共同完成自控任务的网络系统与控制系统
CAN(Controller Area Netw ork)总线,又称控制域局域网,属于总线式串行通信网络,最早由BOSCH 公司在80 年代提出,由于可靠性高、实时性强、灵活方便,便于检测维护,因而被广泛应用
在工程设备领域,美国 CAT 公司生产的 CAT980G 装载机,日本小松的 WA380-3 和 WA500-3,日本川崎的 KLD80ZⅢ等均采用 CAN 总线技术,提高设备的整体控制技术水平
根据 CAN 总线的技术特点,本文设计了一种基于 CAN 总线的工程设备控制系统,通过分布式智能控制来提高工程设备的控制技术和信息化水平
2 系统组成与功能特点 2
1 系统组成 传统的工程装备控制系统采用集中式控制,除主控制器外一般都不具备可智能化的条件
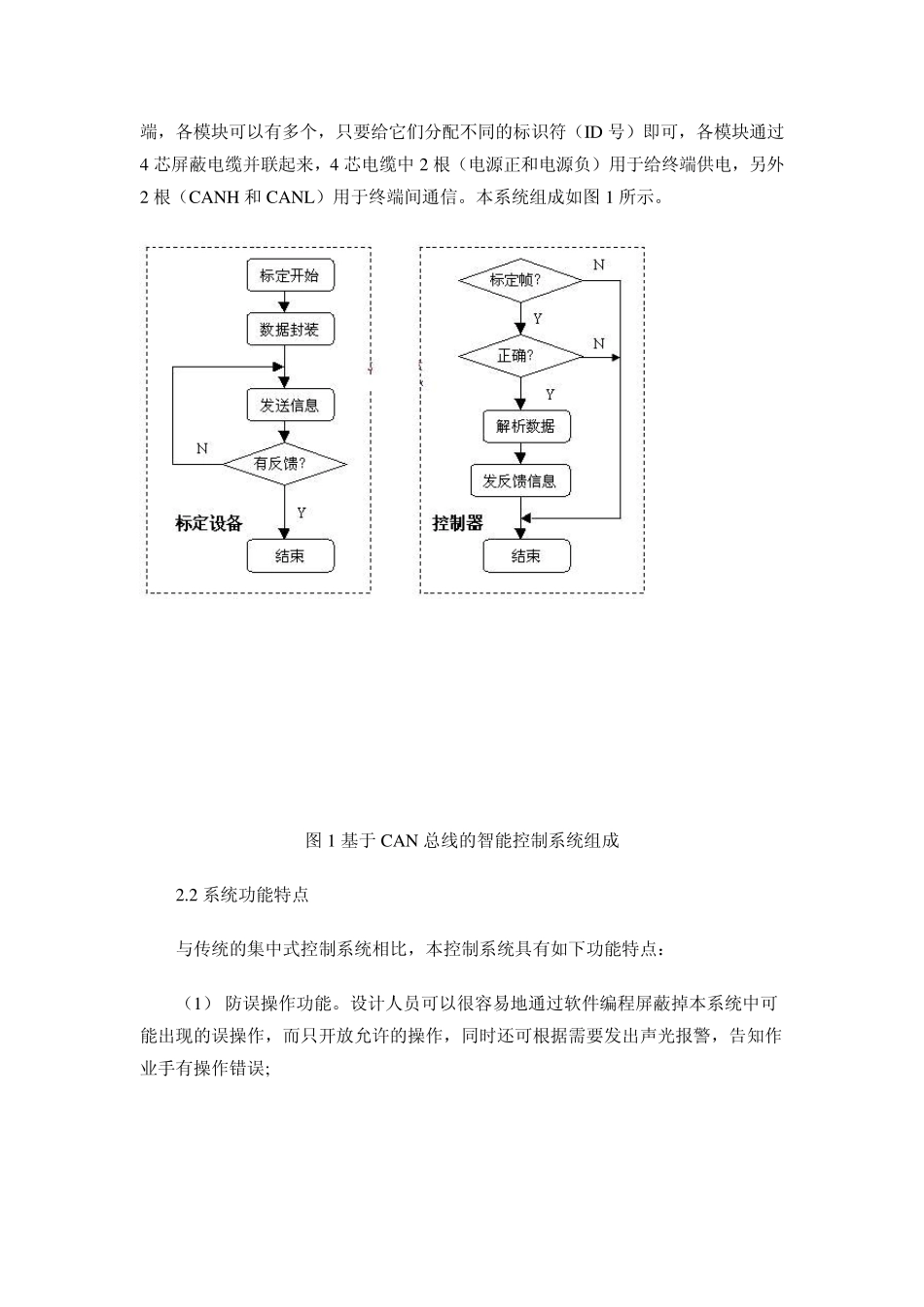
基于 CAN 总线的控制系统采用分布式智能总线控制,将各功能模块做成智能终端,再通过 CAN 总线连接,并辅之以一定的通讯协议,这样不仅提高了整个系统的可靠性及智能化水平,同时降低了系统的复杂程度
系统由主控制器、操纵盒、传感器、执行机构和虚拟仪表等组成,各部件采用CAN 总线互联
主控制器负责系统的信息协调与处理;作业终端是作业手对作业过程进行干预的主要手段;传感器负责感知系统的状态;执