FANUC点焊机器人培训资料广州德恒汽车装备科技有限公司1伺服枪的安装设置1
附加轴添加前基本设定1-1
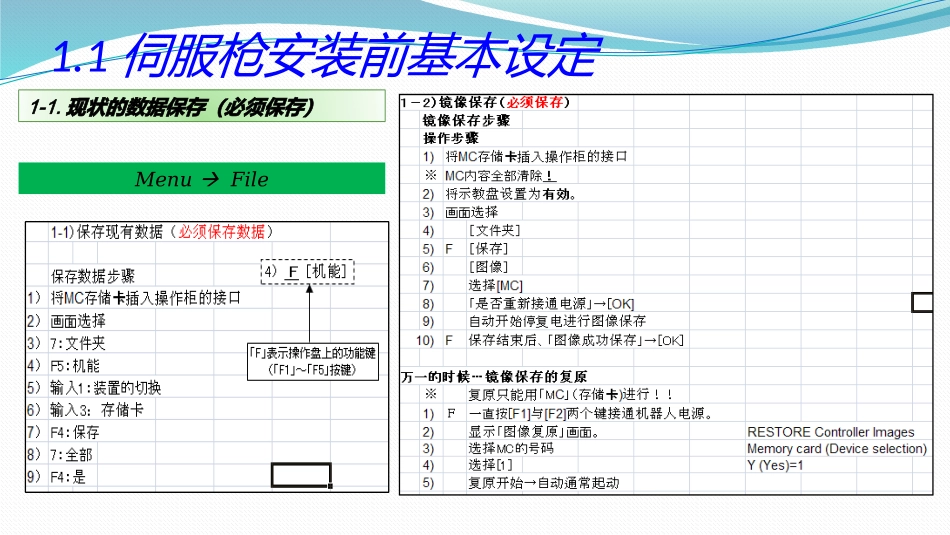
现状的数据保存(必须保存)2
Controlstart下的设置2-1
Controlstart伺服焊枪的添加3
添加附加轴后设置步骤与操作3-1
焊枪文件的导入,BZAL警报的解除3-2
焊枪关闭方向,最大加压力的设定3-3
焊枪设定以及自动调整的实施3-4
电机回转方向的设定,加压力校准(E/CR1201&R1202等)3-5
枪头距离条件,SYSDIS:枪头距离条件相关文件夹3-6
坐标系的设定3-7
PLAYLOAD设定3-7
修模基准值的设定及修模程序的示教1
1伺服枪安装前基本设定1-1
现状的数据保存(必须保存)MenuFile在伺服焊枪软、硬件准备完成后,通过FANUCRobotcontroller的TP界面对伺服枪进行添加及相关设置,完成伺服枪的添加
控制启动模式(controlstart)伺服焊枪电机参数在控制启动模式下配置1
2伺服枪控制开始的设置2-1
Controlstart伺服焊枪的添加Controlstartmenumaintenance进入控制启动模式后,进入下图的界面对伺服电机进行参数配置(光标移动到“2servogunaxes”,按F4—MANUAL进行手动配置伺服参数)
2伺服枪控制开始的设置2-1
Controlstart伺服焊枪的添加ControlstartmenumaintenanceSTEP1STEP3STEP4STEP5STEP6STEP7STEP8STEP2STEP9STEP10STEP11•FSSB是FANUCSERIESSERVOBUS指把伺服放大器的控制信号用光纤通讯的一种通讯方式•如果主板出来一根光纤,那么它是FSSB1,如果主板出来第二根光纤,是FSSB2•Partial:以焊枪调整公用进行调整为前