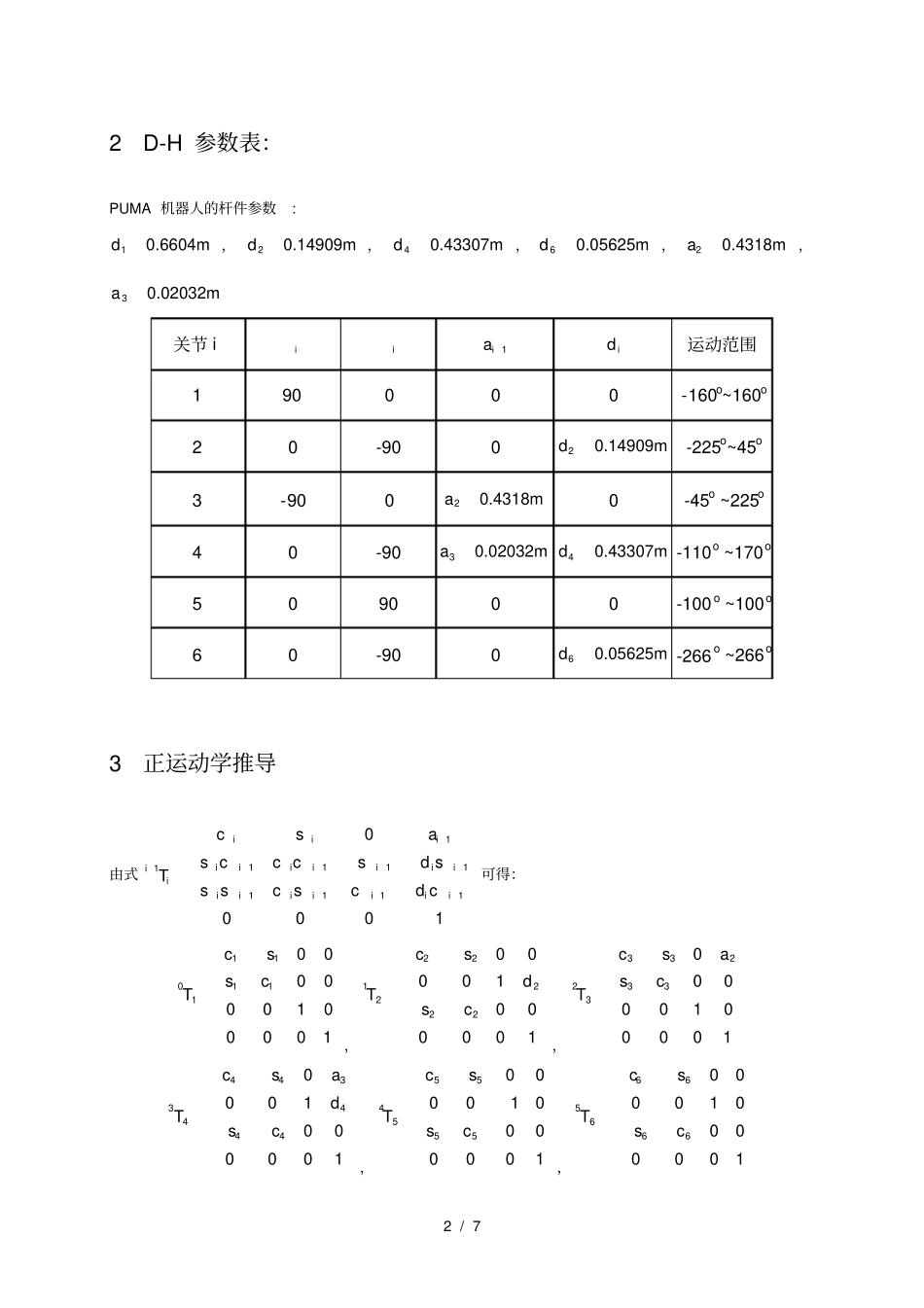
1 / 7 PUMA 机器人大作业1坐标系建立:坐标系可以简化为:2 / 7 2D-H 参数表:PUMA 机器人的杆件参数:1d0
6604m ,2d0
14909m ,4d0
43307m,6d0
05625m,2a0
4318m,3a0
02032m关节 iii1iaid运动范围190000-160o~160o20-9002d0
14909m-225o~45o3-9002a0
4318m0-45o ~225o40-903a0
02032m4d0
43307m -110 o ~170 o509000-100 o ~100 o60-9006d0
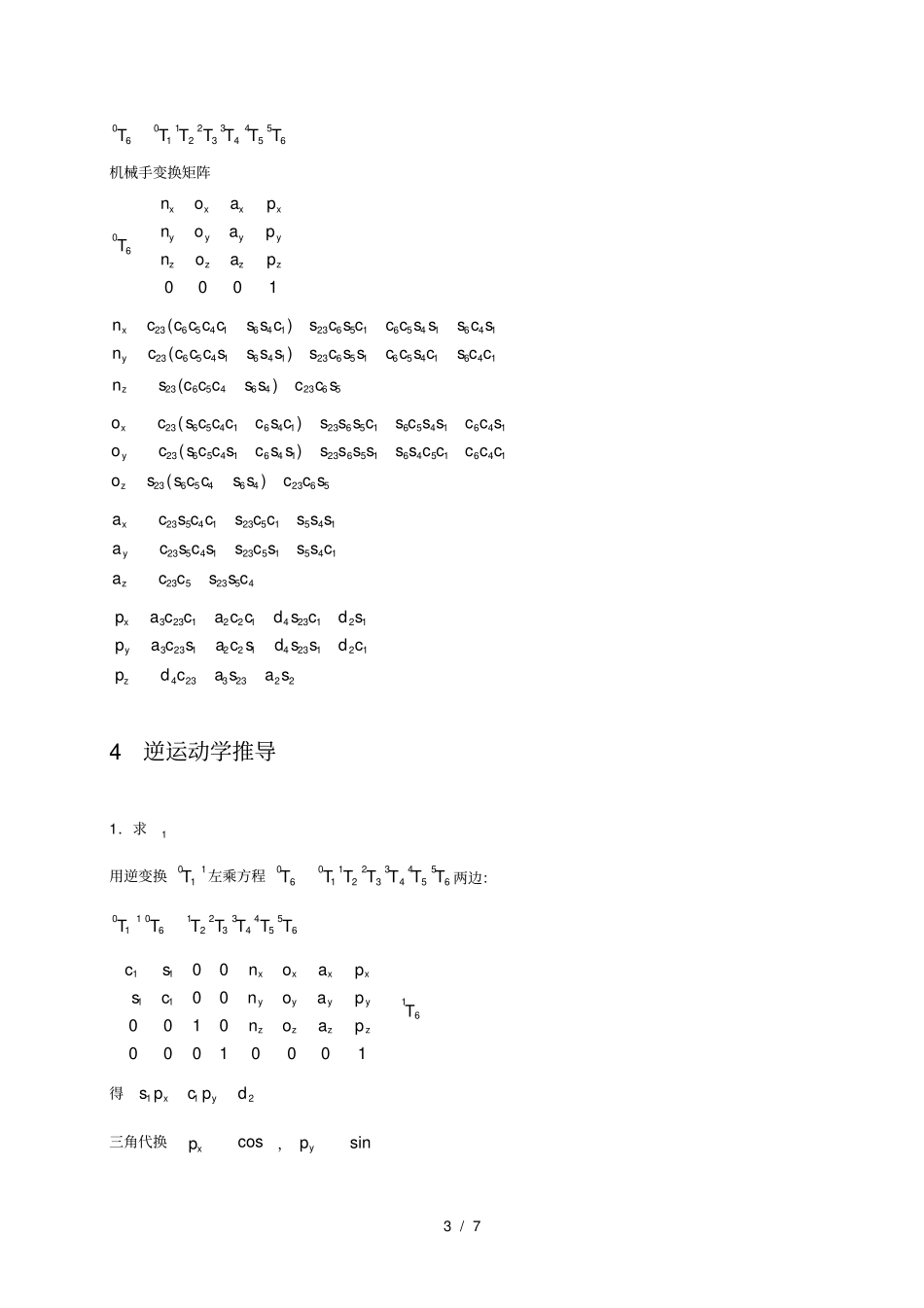
05625m -266 o ~266 o3正运动学推导由式111111111100001iiiiiiiiiiiiiiiiiiicsas cc csd sTs sc scd c可得:111101000000100001csscT,222122200001000001csdTsc,332332300000100001csascT443434440001000001csadTsc,554555000010000001csTsc,665666000010000001csTsc3 / 7 00123456123456TT TT TTT机械手变换矩阵060001xxxxyyyyzzzznoapnoapTnoap23654 16412365 1654164 123654 164 12365 1654 1641236546423 65()()()xyzncc c c cs s cs c s cc c s ss c sncc c c ss s ss c s sc c s cs c cnsc c cs sc c s23654164 123 651654 164 123654 16412365 1645 164 1236546423 65()()()xy