车载雷达机电式自动调平系统的方案现代战争对雷达机动性能的要求越来越高,特别是机动陆面载体如车载雷达天线、发射架等设备,到达预定位置后,要求快速架设精确的水平基准
车载平台的人工手动调平已很难满足军方对雷达快速架设、快速撤收,以及平台高精度调平的要求
机电式自动调平与人工调平相比具有调平时间短、调平精度高、可靠性高等特点
本设计是以单片机和CPLD为控制核心,伺服控制器和伺服电机为执行单元的机电式四点支撑自动调平随动控制系统,能够实现机电式车载平台自动调平的全自动化、全闭环控制
其优点在于调平时间短 ( 少于 3 分钟 ) 、调平精度高 (小于 3’) 、可靠性高、可在恶劣环境下工作等方面
系统组成调平原理调平方式通常有3 点式或 4 点式,特殊的还有多点式如6 腿或更多腿平台
本系统根据实际的应用情况,采用 4 点式调平方式
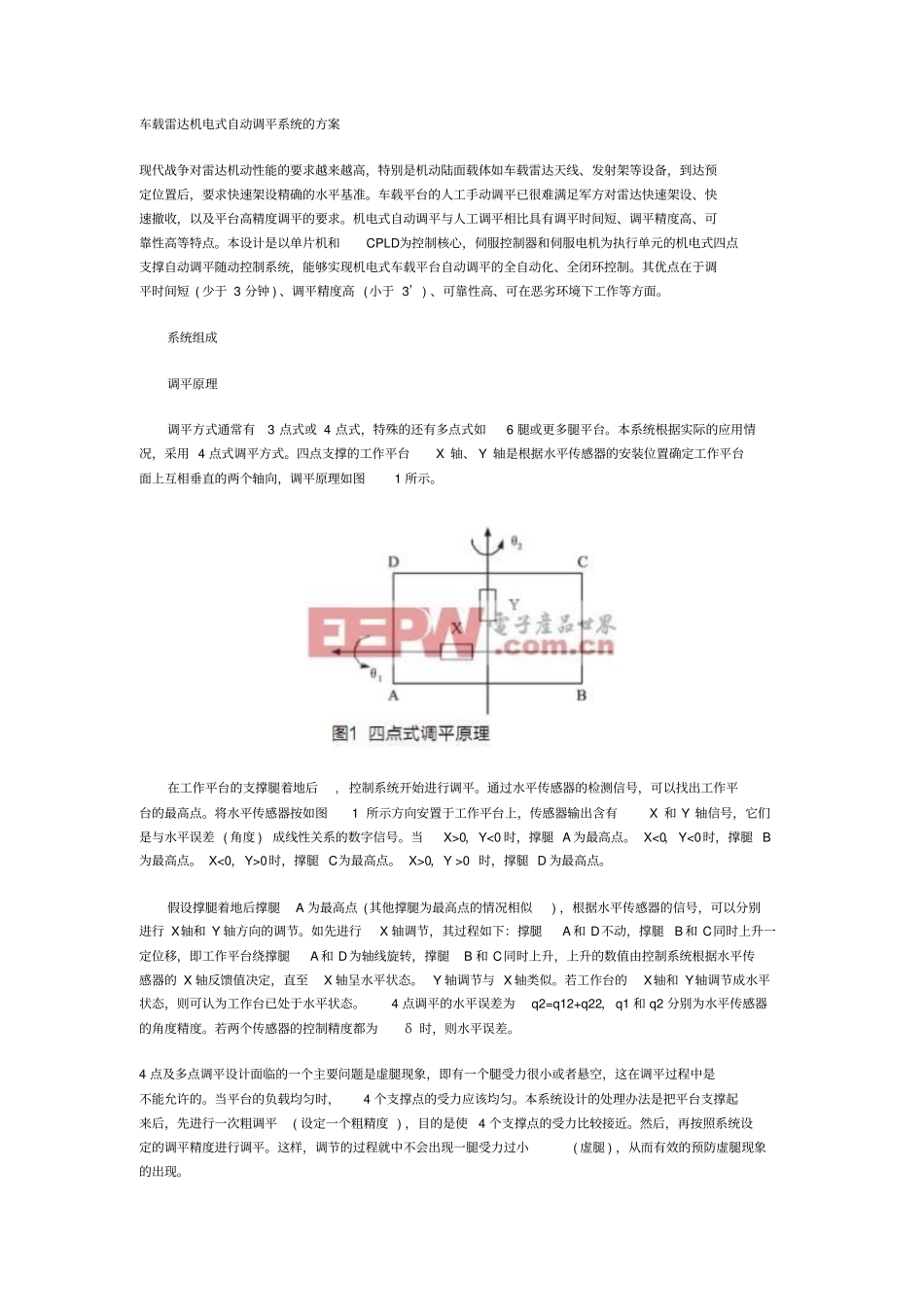
四点支撑的工作平台X 轴、 Y 轴是根据水平传感器的安装位置确定工作平台面上互相垂直的两个轴向,调平原理如图1 所示
在工作平台的支撑腿着地后, 控制系统开始进行调平
通过水平传感器的检测信号,可以找出工作平台的最高点
将水平传感器按如图1 所示方向安置于工作平台上,传感器输出含有X 和 Y 轴信号,它们是与水平误差 ( 角度 ) 成线性关系的数字信号
当X>0,Y