1 第1章 概述 控制系统设计是控制科学与工程系学生的一门必修专业基础课,课程中的一些概念相对比较抽象,如系统的稳定性、可控性、收敛速度和抗干扰能力等
倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定系统,作为控制系统的被控对象,它是一个理想的教学实验设备,许多抽象的控制概念都可以通过倒立摆直观地表现出来
本课程设计的目的是让学生以一阶倒立摆为被控对象,了解用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(最优控制)的设计方法,掌握 MATLAB仿真软件的使用方法及控制系统的调试方法,加深学生对所学课程的理解,培养学生理论联系实际的能力
本课程设计的被控对象采用固高公司生产的GIP-100-L型一阶倒立摆系统,课程设计包括三方面的内容: (1)建立一阶倒立摆的线性化数学模型; (2)倒立摆系统的PID控制器设计、MATLAB仿真及实物调试; (3)倒立摆系统的最优控制器设计、MATLAB仿真及实物调试
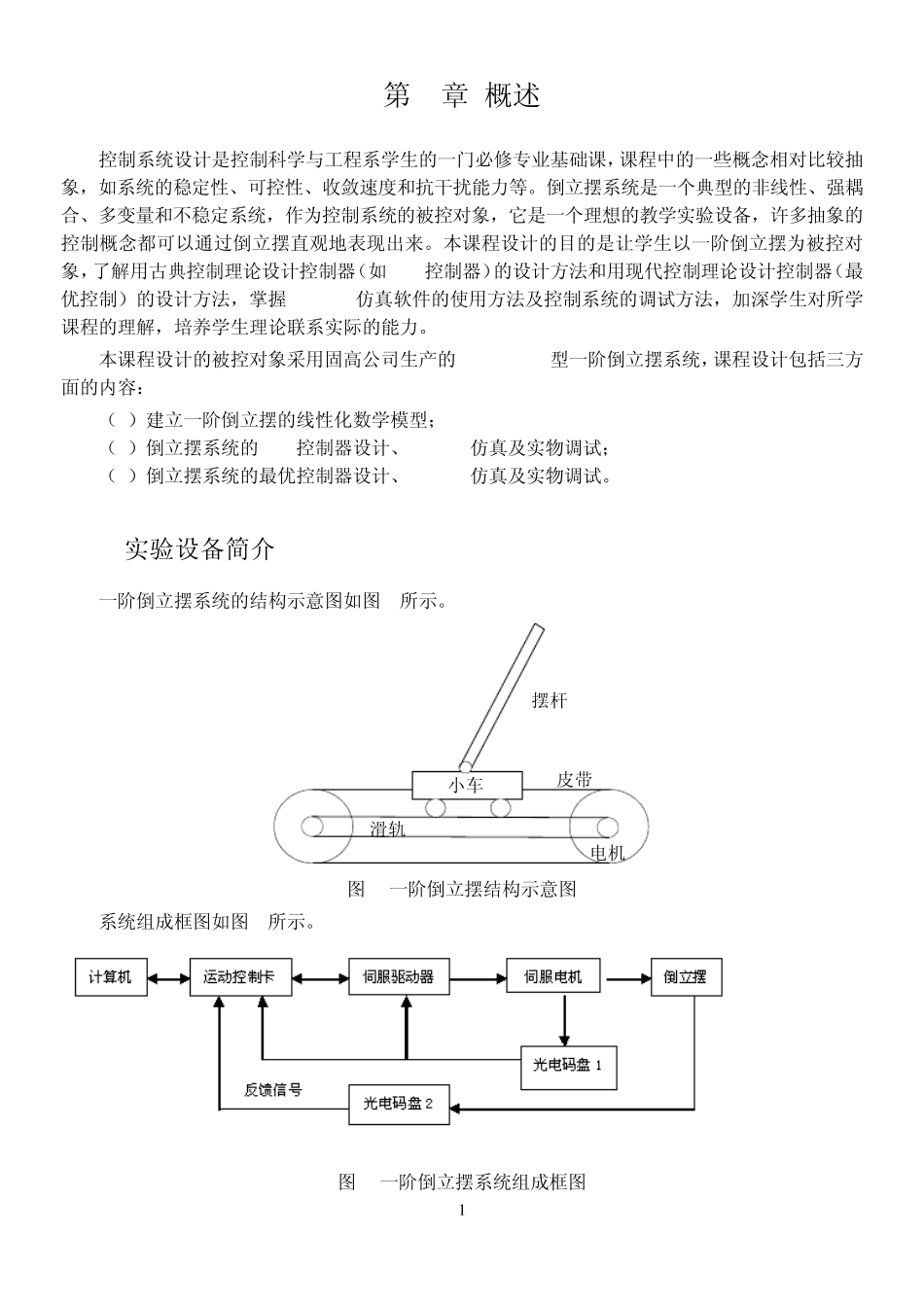
1 实验设备简介 一阶倒立摆系统的结构示意图如图 1所示
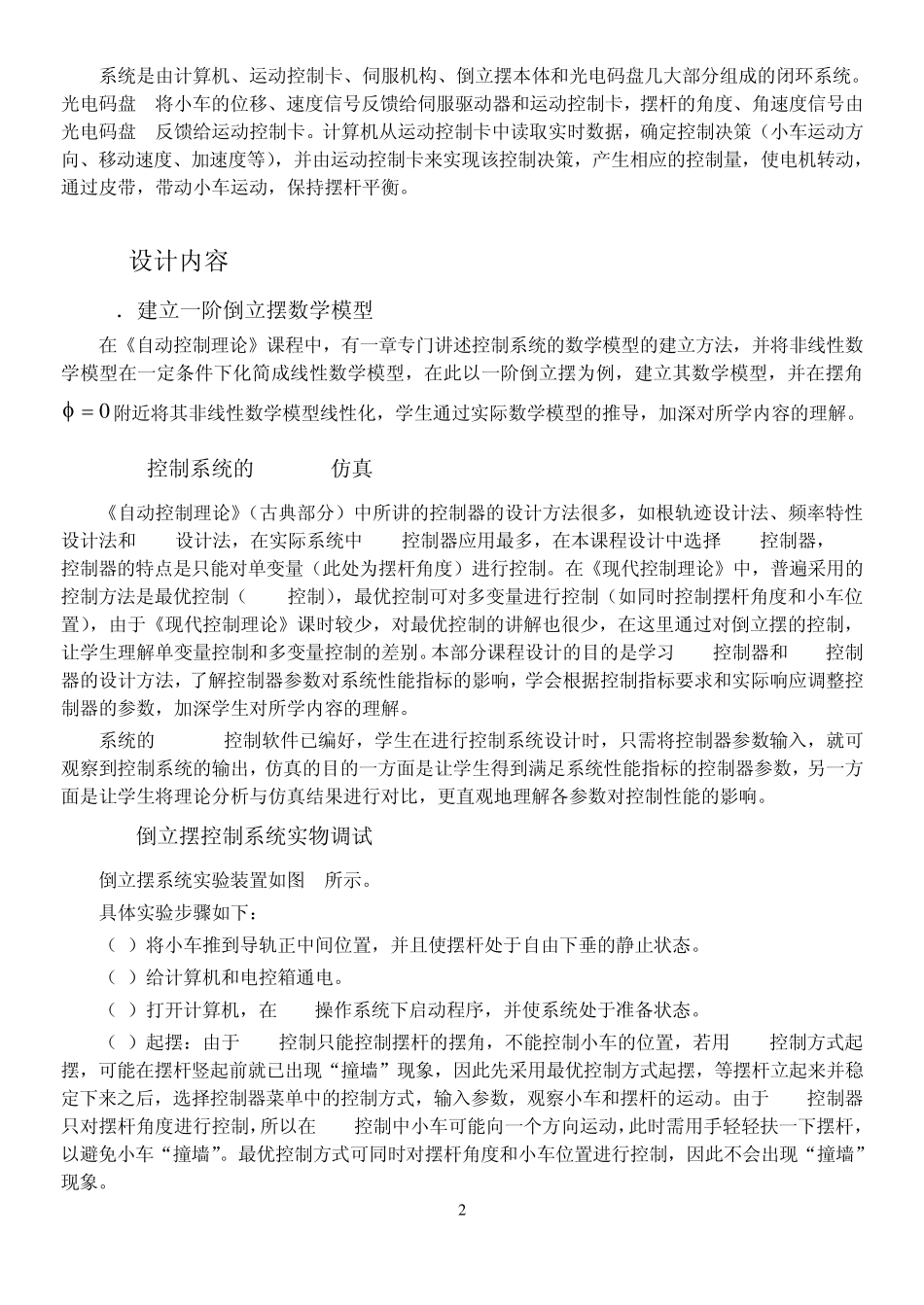
小车滑轨皮带电机摆杆 图 1 一阶倒立摆结构示意图 系统组成框图如图 2所示
图 2 一阶倒立摆系统组成框图 2 系统是由计算机、运动控制卡、伺服机构、倒立摆本体和光电码盘几大部分组成的闭环系统
光电码盘 1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,摆杆的角度、角速度信号由光电码盘 2反馈给运动控制卡
计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带,带动小车运动,保持摆杆平衡
2 设计内容 1.建立一阶倒立摆数学模型 在《自动控制理论》课程中,有一章专门讲述控制系统的数学模型的建立方法,并将非线性数学模型在一定条件下化简成线性数学模型,在此以一阶倒立摆