电动智能小车实训报告 实训目的: 这次设计智能小车的目的是为了掌握电路设计的方法和技巧
如何将学习到的理论知识运用到实际当中去,怎样能够活学活用,深入的了解电子元器件的使用方法,了解各种元器件的基本用途和方法,能够灵活敏捷的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验 ,加强焊接能力和技巧,完成基本的要求
并能完美的完成这次实训
根据老师给的控制要求,和自己的发挥扩充能力,独立的,大胆的去实践,开拓创新,能够将自己的想法体现到实际电路当中去
实训日期: 2005年 11月 21日~2005年 12月 9日 实训地点: 单片机实验室和电子 3031教室 技能训练: 掌握基本的电路设计方法和技巧,能够独立的分析解决一般性质的问题
巩固单片机基本的知识,加强理论与实践的结合能力
能够分析一般性的电路,了解各种元器件的基本用途和方法,积累更多的设计经验 ,加强焊接能力和技巧
实训进程: 11月 21日 讲解电动小车总体方案是设计 11月22日~11月23日 机械部分的制作与组装 11月24日~11月30日 电路部分的设计、制作、调试、与组装 12月 1日~12月 2日 整机组装与裸机测试 12月 5日~12月 7日 控制程序的编制与调试 12月8日 编写实训报告 12月9日 实训考核、成绩评定 方案论证、 1.寻迹检测方案的选择 探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可以根据接收到的反射光强弱来判断是否是黑线
利用这个原理,可以控制小车行走的路迹
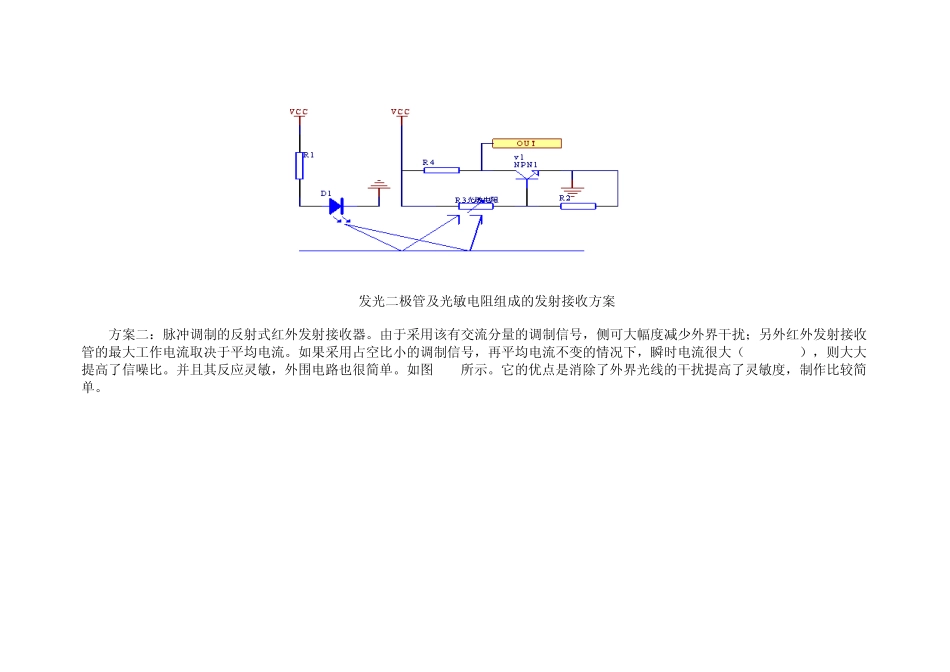
下面几种可行的方案是根据本原理设计的: 方案一:采用普通的发光二极管及光敏电阻组成的发射接收方案,如图 1-1所示
其工作原理:当无光照时,光敏电阻呈现高阻状态,又分压公式可知,电阻 R2无压降三极管截止,三极管的集电极输出高电平;反之,当有光照的时候,光敏电阻接收到反射的