1 智能网联汽车封闭道路测试评价方法及要求 1 范围 本标准规定了智能网联汽车封闭道路测试的术语和定义、缩略语、通用要求、测试项目、测试方法和评价方法
本标准适用于具有自动驾驶功能的M1、M2、N1、N2智能网联汽车封闭道路的测试与评价,其他车型可参考执行
2 规范性引用文件 下列文件对于本文件的应用是必不可少的
凡是注日期的引用文件,仅所注日期的版本适用于本文件
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件
ISO 15623:2013(E) 智能运输系统—前车碰撞预警系统—性能要求和测试规程 ISO 17361:2017(E) 智能运输系统—车道偏离预警系统—性能要求和测试规程 Euro-NCAP-AEB-C2C-Test-Protocol-V302-2019 欧盟新车评估规程 自动紧急制动系统-车对车测试规程 GB 7258-2017 机动车运行安全技术条件 GB 5768
3-2009 道路交通标志和标线 第3部分:道路交通标线 GB 15089-2001 机动车辆及挂车分类 GB/T 20608-2006 智能运输系统自适应巡航控制系统性能要求与检测方法 GB/T 33577-2017 智能运输系统 车辆前向碰撞预警系统性能要求和测试规程 GB/T 3730
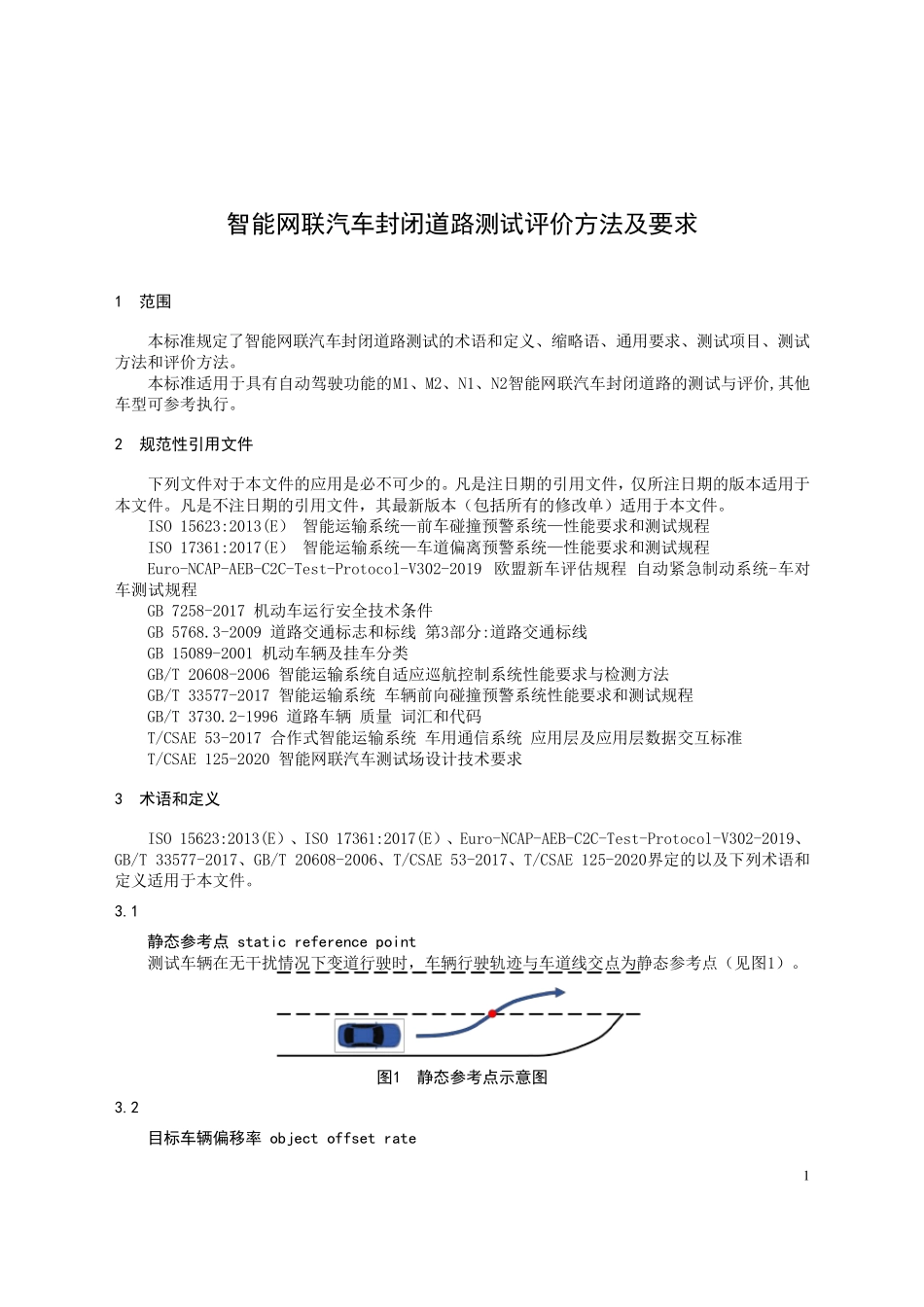
2-1996 道路车辆 质量 词汇和代码 T/CSAE 53-2017 合作式智能运输系统 车用通信系统 应用层及应用层数据交互标准 T/CSAE 125-2020 智能网联汽车测试场设计技术要求 3 术语和定义 ISO 15623:2013(E)、ISO 17361:2017(E)、Euro-NCAP-AEB-C2C-Test-Protocol-V302-2019、GB/T 33577-2017、GB/T 20608-2006、T/CSAE 53-2017、T/CSAE 125-