实验六 最小拍控制系统 一、实验目的 1.掌握最少拍有纹波系统和最少拍无纹波系统的计算机控制脉冲传函数D(Z)的设计方法
2.了解最少拍设计的饱和非线性条件及改进设计
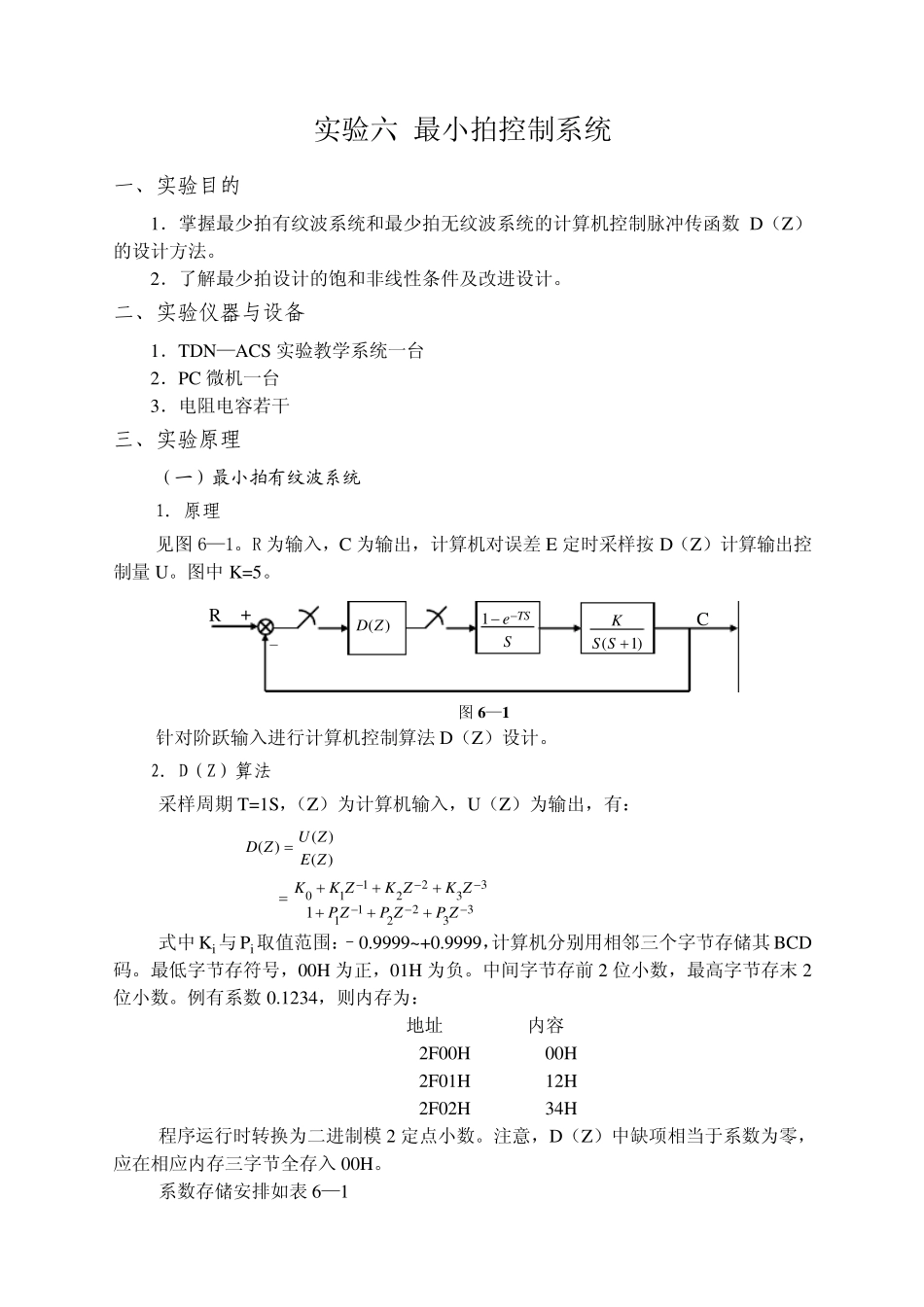
二、实验仪器与设备 1.TDN—ACS 实验教学系统一台 2.PC 微机一台 3.电阻电容若干 三、实验原理 (一)最小拍有纹波系统 1.原理 见图 6—1
R 为输入,C 为输出,计算机对误差 E 定时采样按 D(Z)计算输出控 制量 U
图中 K=5
Se TS−−1)1(+SSKC R -+)(ZD 图 6 —1 针对阶跃输入进行计算机控制算法D(Z)设计
2.D(Z)算法 采样周期 T=1S,(Z)为计算机输入,U(Z)为输出,有: 33221133221101)()()(−−−−−−++++++==ZPZPZPZKZKZKKZEZUZD 式中 Ki与 Pi取值范围:–0
9999~ +0
9999,计算机分别用相邻三个字节存储其 BCD 码
最低字节存符号,00H 为正,01H 为负
中间字节存前 2 位小数,最高字节存末 2位小数
1234,则内存为: 地址 内容 2F00H 00H 2F01H 12H 2F02H 34H 程序运行时转换为二进制模 2 定点小数
注意,D(Z)中缺项相当于系数为零, 应在相应内存三字节全存入 00H
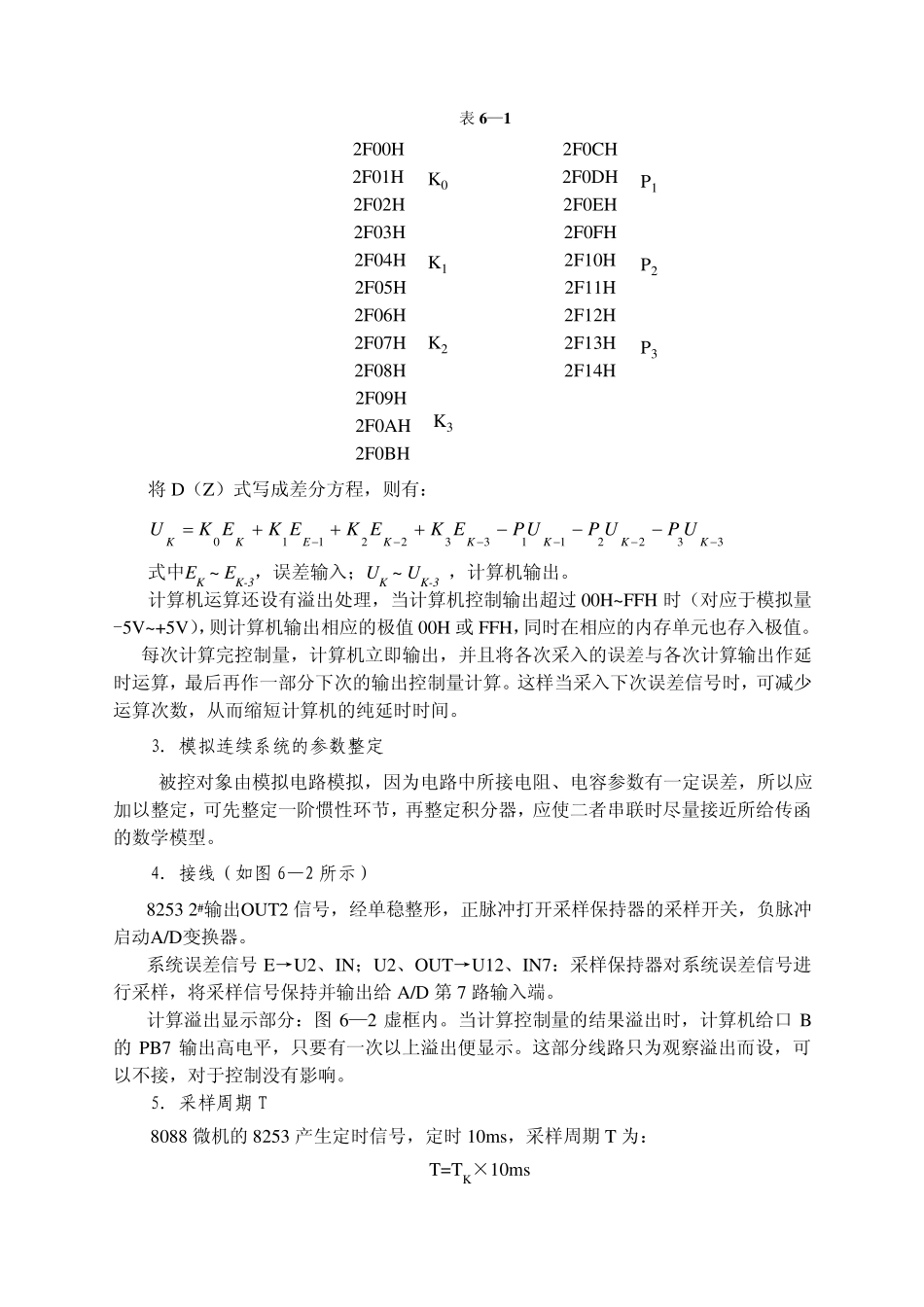
系数存储安排如表 6—1 表 6 — 1 2F00H 2F0CH 2F01H 2F0DH 2F02H 2F0EH K0P12F03H 2F0FH 2F04H 2F10H 2F05H 2F11H K1P22F06H 2F12H 2F07H 2F13H 2F08H 2F14H K2P3 2F09H 2F0AH 2F0BH K3将 D( Z) 式 写 成 差 分 方 程 , 则 有 : 3322113322110−−−−−−−−−+++=KKKKKEK