智能轨道型电力巡检机器人系统设计方案1、项目背景1
1 传统的人工巡检难以适应发展要求目前电力公司对于所管辖的配电房、开关室,例行巡检每月 1 次,红外测温巡测每月 1 次,全部依赖于人工巡视作业
在高负荷期间和有特殊保供电要求时,须增加巡检频次
随着近年来电网飞速发展,生产人员不足和巡检工作量增加之间的矛盾日益突出,而运维一体化等工作在扩展业务范围的同时也给变电运维工作提出了更高的要求,在这样的形势下,传统的“人工巡检、手动记录”的巡检作业方式难以适应电力系统精益化、集约化的发展要求
2 电力巡检机器人的研究意义重大电力安全巡检工作对保障电力安全生产至关重要
除人工巡检以外,目前变电站/配电房内通常采用数量有限的固定传感器及固定监控摄像头进行监测,很难全面的、准确的、实时的检测并获得设备的运行状态
变电站/配电房需检测变压器与高低压开关的运行状态及仪表面板读数,检测信息多
通过智能轨道巡检机器人的应用,对减少工作量、提高操作维护效率和设备异常应急处理速度有明显的效果,主要体现在以下二个方面:一是大大降低操作维护人员工作台的强度
二是缩短应急响应时间
使用机器人检测系统后,可为操作维护人员提供远程视频,缩短处理时间
智能轨道巡检机器人可在设备运转期间对设备进行多方位、多功能监测并做出及时预警,对保障电力设备正常运转,提高设备巡检效率与质量、减少巡检人员数量具有重要意义
2、电力轨道式智能巡检机器人系统设计2
1 项目目标本项目实现开关柜红外测温、局放检测、柜面及保护装置信号状态指示等的自动识别,继保室保护屏柜压板状态、空开位置、装置信号灯指示以及数显仪表的自动识别读数
并且采用无缝滑环型导轨取电,实现 24 小时不间断巡视,也可自定义周期和设备进行特殊巡视
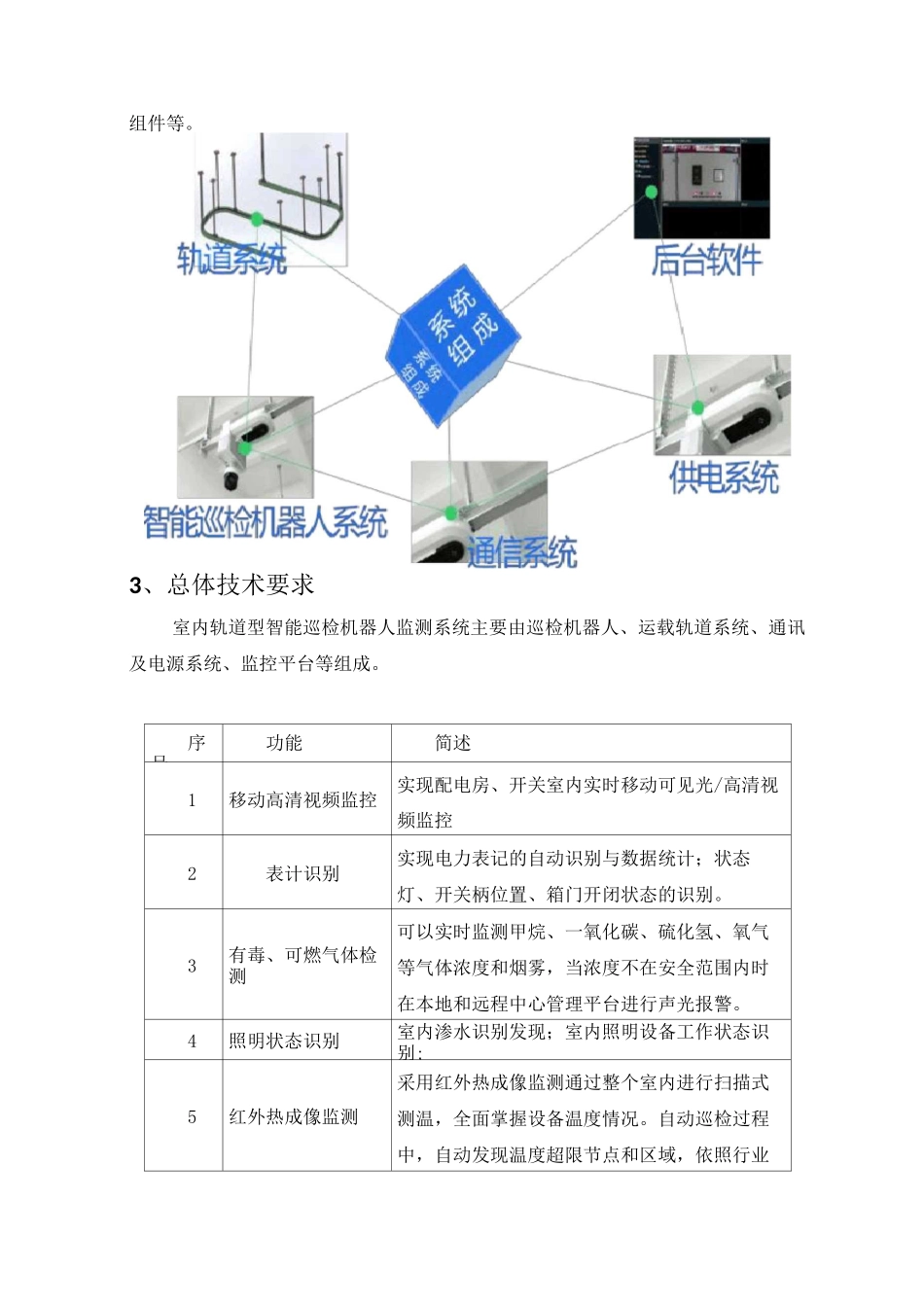
智能轨道巡检机器人可沿轨道精确定位检测点,通过搭载的传感器采集设备参数、环境信息,实现视频监控、仪表的智能读表以及