第三章模型参考自适应控制3
0局部参数最优化设计方法系统要求:系统参数变换速度比系统过渡过程进行速度缓慢得多
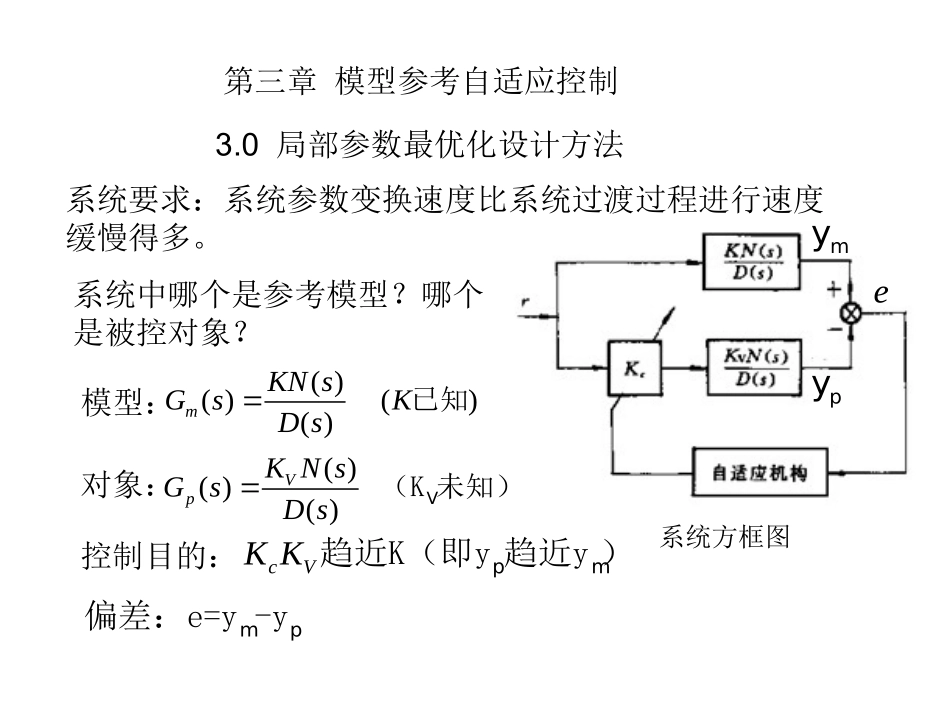
系统方框图模型:对象:()()()()mKNsGsKDs已知系统中哪个是参考模型
哪个是被控对象
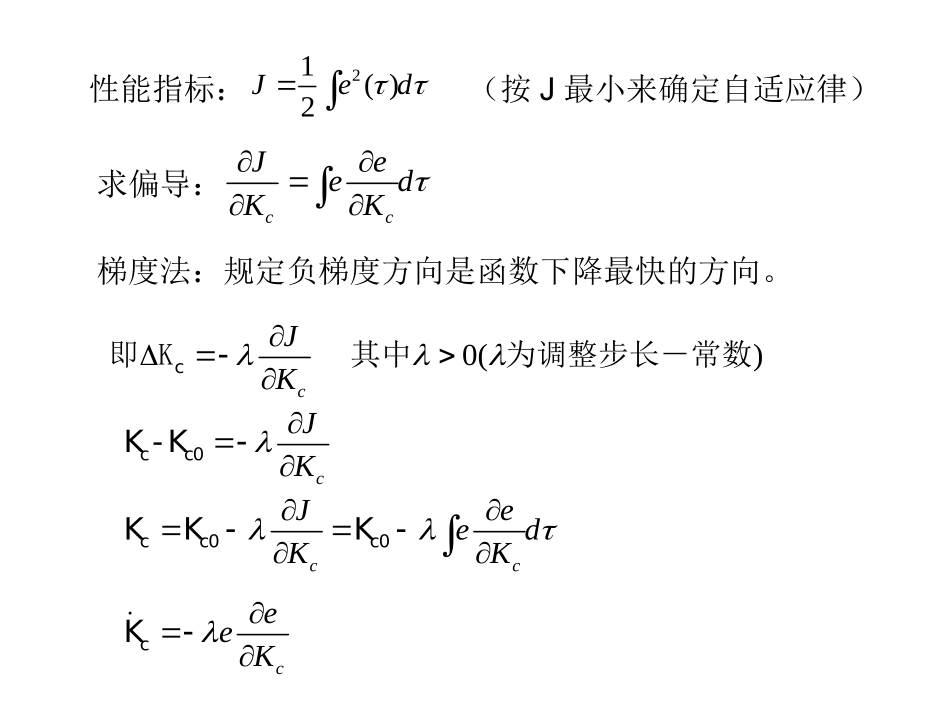
()()()VpKNsGsDsV(K未知)控制目的:cVKKpm趋近K(即y趋近y)pymyemp偏差:e=y-y性能指标:21()2Jed(按J最小来确定自适应律)求偏导:ccJeedKK梯度法:规定负梯度方向是函数下降最快的方向
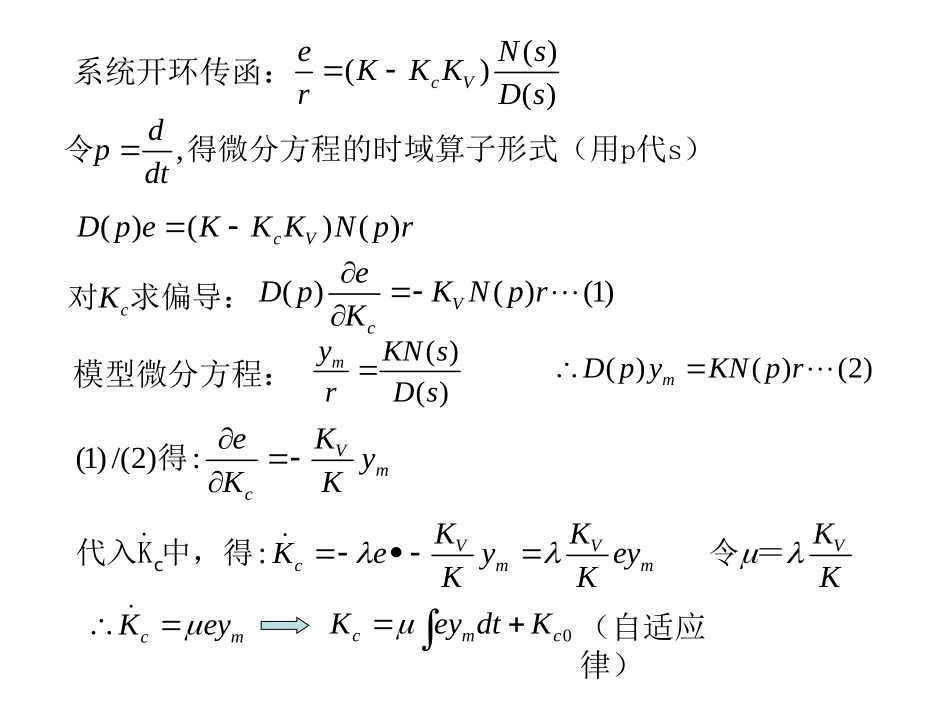
0()cJKc即K其中为调整步长-常数cJKcc0K-KcJKcc0KKceedKc0KceeKcK系统开环传函:()()()cVeNsKKKrDs,dpdt令得微分方程的时域算子形式(用p代s)()()()cVDpeKKKNprcK对求偏导:()()(1)VceDpKNprK模型微分方程:()()myKNsrDs()()(2)mDpyKNpr(1)/(2):VmcKeyKK得:VcmKKeyKc代入K中,得VmKeyKVKK令=cmKey0cmcKeydtK(自适应律)0cmcKeydtK-MIT方案:乘法器、积分器组成mypyemyMIT自适应控制方案图缺点:稳定性得不到保证,要检验稳定性(保证e收敛)
优点:设计方法简单,易于实现
例:设控制对象的微分算子方程为:221(1)()()pVapapytKrt参考模型的微分算子方程为:221(1)()()mapapytKrt试按MIT方案,求自适应律
解:设自适应可调增益为Kc,则得:21()mmmayayyKrt21()pppcVayayyKKrt相减:21()()cVaeaeeKK