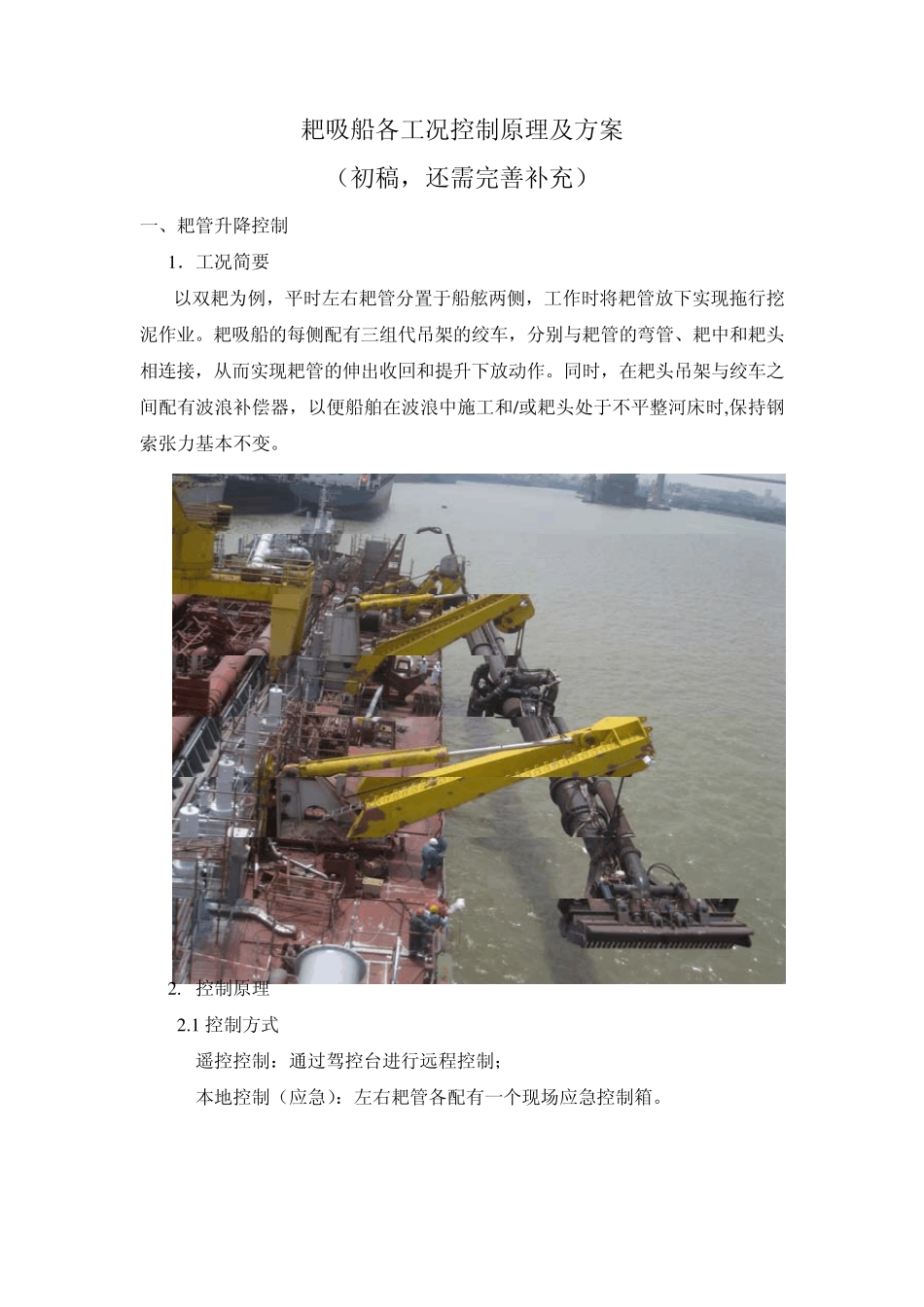
耙吸船各工况控制原理及方案 (初稿,还需完善补充) 一、耙管升降控制 1 .工况简要 以双耙为例,平时左右耙管分置于船舷两侧,工作时将耙管放下实现拖行挖泥作业
耙吸船的每侧配有三组代吊架的绞车,分别与耙管的弯管、耙中和耙头相连接,从而实现耙管的伸出收回和提升下放动作
同时,在耙头吊架与绞车之间配有波浪补偿器,以便船舶在波浪中施工和/或耙头处于不平整河床时,保持钢索张力基本不变
控制原理 2
1 控制方式 遥控控制:通过驾控台进行远程控制; 本地控制(应急):左右耙管各配有一个现场应急控制箱
2 控制过程 手动: (1 )耙管推出舷外 首先依次启动三个绞车做起升动作,通过绞车编码器和限位光电开关来判断耙管是否从台架上提起到位,到位后,通过操作面板上的吊架推出收进按钮,控制三个吊架的油缸伸出和缩进,使得耙管跟着动作,直至耙管伸出舷外到位后(到位信号需要通过调试时标定)停止
(2 )下放耙管 耙管推出舷外后,当绞车的下放所有信号都满足时,通过操控驾驶室面板上的三个手柄,使三个绞车做下放动作,通过耙管水平传感器、垂直传感器的角度变化(疏浚监控界面显示),来手动操作三个绞车的速度(通过手柄幅度,手柄带自锁),绞车速度可无级调节(通过手柄信号来改变变量泵的流量)
当弯管绞车下降到位后(通过光电限位开关和编码器判断),弯管绞车停止动作,耙中绞车和耙头绞车继续下放,直至下放到所需要的挖泥深度
耙中绞车和耙头绞车均设有绳长编码器
自动: 通过操作电脑界面上的自动放耙按钮,整个耙管起升、吊架推出和耙管下放自动完成,依靠各个传感器进行保护,但据了解,目前为止,国内所造船舶均没有使用此功能
所谓一键放耙,也仅指下放到吸口到位
绞车及 A 字架状态 耙臂状态及绞车状态显示 耙臂位置显示 A 字架启动条件 耙管绞车启动条件 (1) 传感器 垂直角度传感器(IP 68) 每