Denso 垂直关节机器人的运动分析 一、 实验目的: 1
理解串联机器人运动学的 D-H 坐标系的建立方法; 2
掌握串联机器人的运动学方程的建立; 3
会运用运动方程求解运动学的正解和反解
二、 实验原理: 1
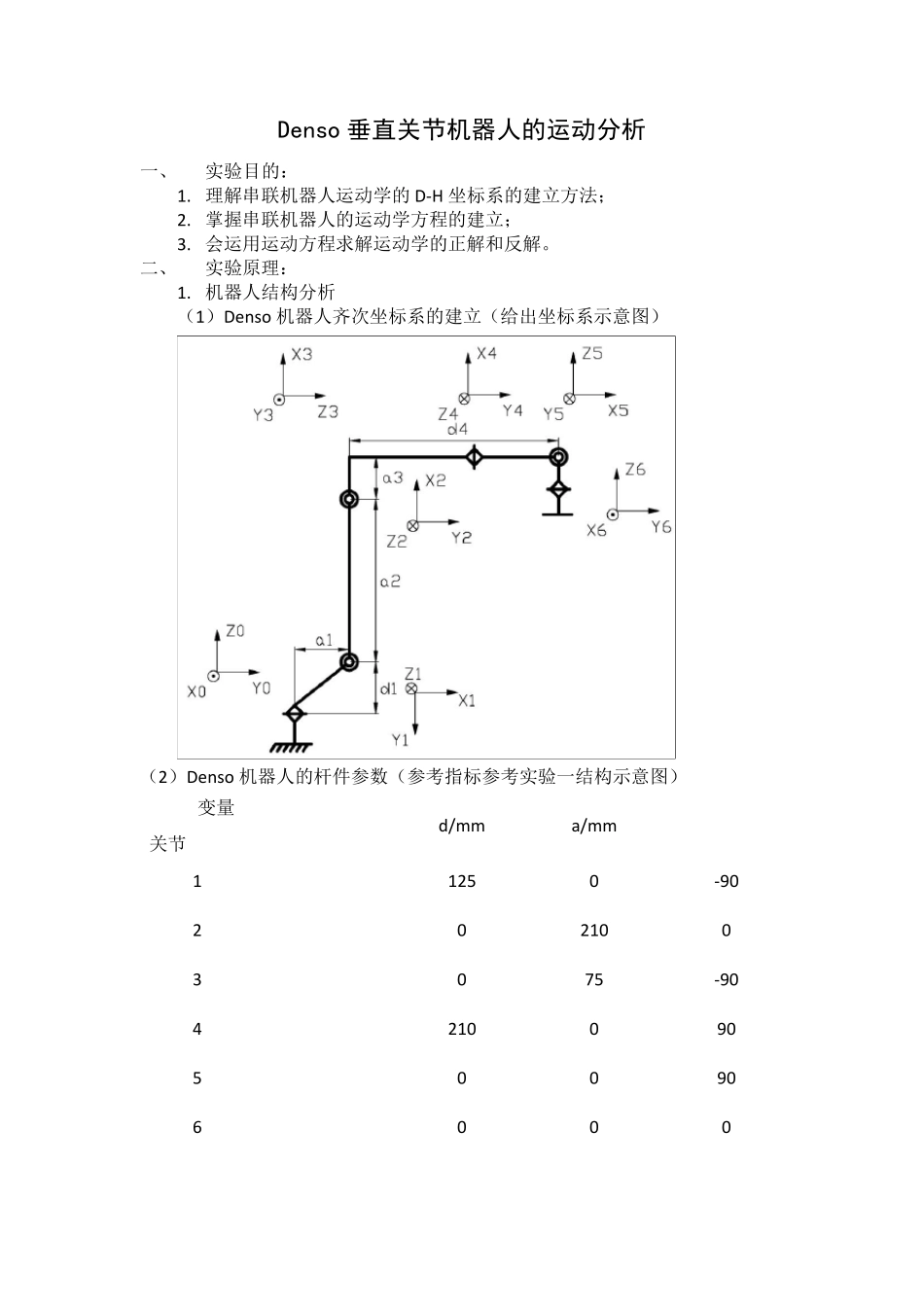
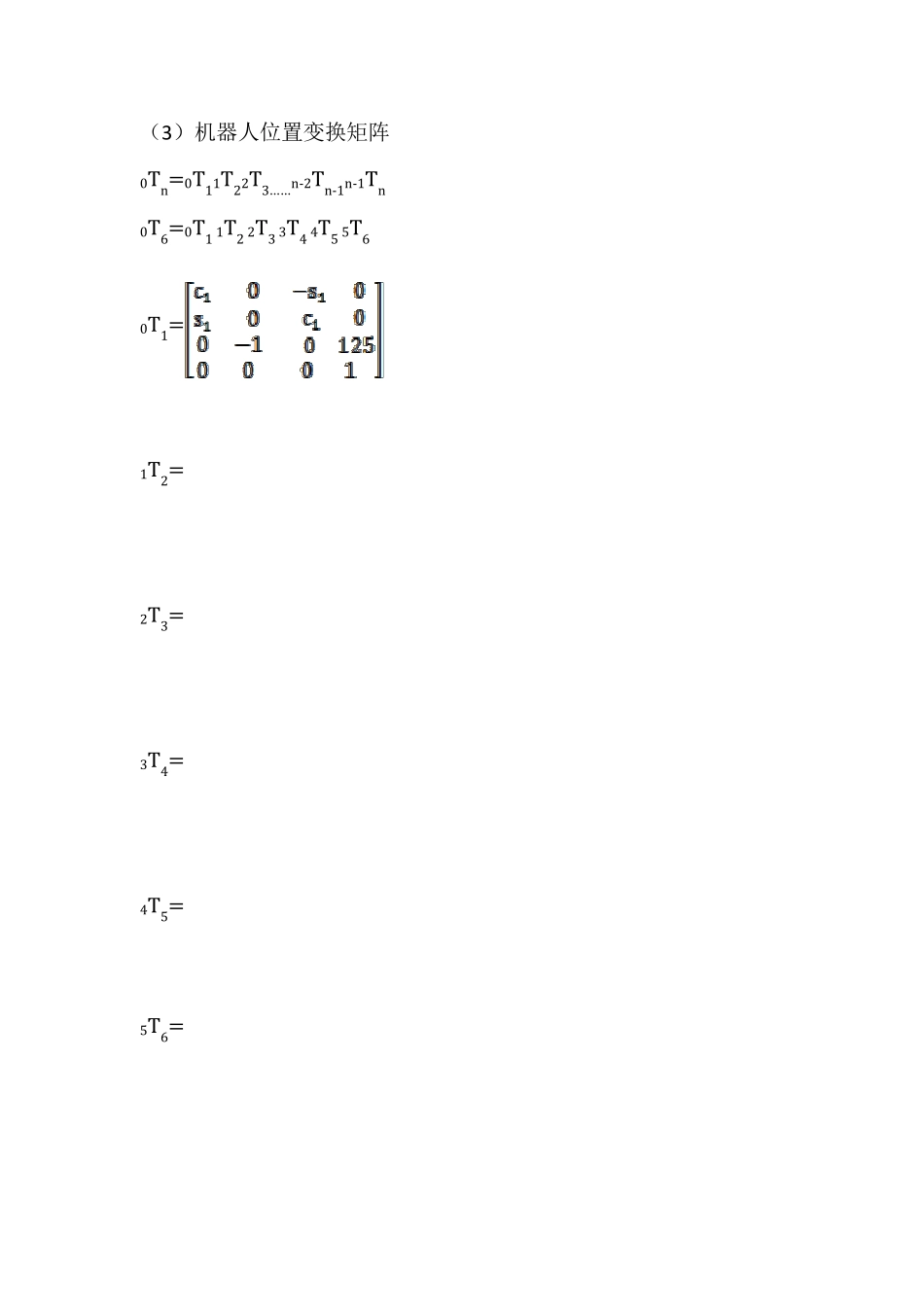
机器人结构分析 (1)Denso 机器人齐次坐标系的建立(给出坐标系示意图) (2)Denso 机器人的杆件参数(参考指标参考实验一结构示意图) 变量 关节 d/mm a/mm 1 125 0 -90 2 0 210 0 3 0 75 -90 4 210 0 90 5 0 0 90 6 0 0 0 (3 )机器人位置变换矩阵 0Tn=0T11T22T3……n-2Tn-1n-1Tn 0T6=0T1 1T2 2T3 3T4 4T5 5T6 0T1= 1T2= 2T3= 3T4= 4T5= 5T6= 0T6= 其中: 式中 2
运动学正解 把相应的角度值代入以上各式便得到了运动学正解的变换矩阵
运动逆解 现在已知机器人的末端位姿矩阵,求出各关节旋转的角度
注意到 将上面两式相除得: , 由式0T6=0T1 1T2 2T3 3T4 4T5 5T6,得: 0T1-1 0T6= 1T2 2T3 3T4 4T5 5T6 取第一行第四列和第二行第四列得: 令,,移项得: 对上面两式左右两边同时平方然后相加得: 化简得: 同理,求第三个角: 令Q=1T2 -1 0T1-1 0T6 则: Q= 2T3 3T4 4T5 5T6 取第一行第四列得: 可以求得 令M=2T3-1 1T2 -1 0T1-1 0T6 则: M= 3T4 4T5 5T6 取第一行第三列,第三行第二列,第三行第三列得: 于是就求出了
正解实验代码: PI=3
1415926; a=importdata('1
txt'); syms a1; syms a2; syms a3;