绪论 一、判断题(正确 T,错误 F) 1
构件是机械中独立制造的单元
能实现确定的相对运动,又能做有用功或完成能量形式转换的机械称为机器
机构是由构件组成的,构件是机构中每个作整体相对运动的单元体
所有构件一定都是由两个以上零件组成的
( ) 二、单项选择题 1
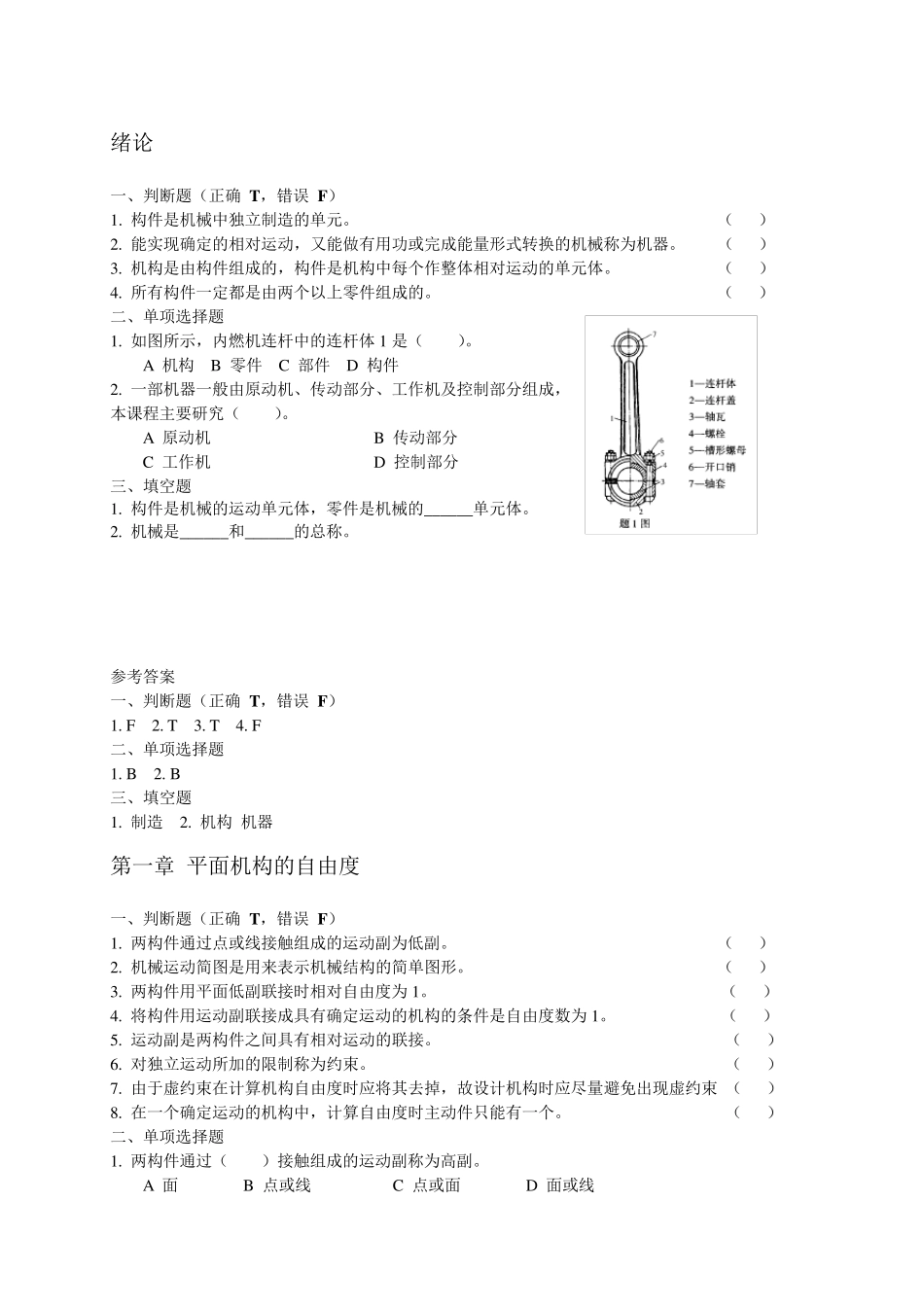
如图所示,内燃机连杆中的连杆体 1 是( )
A 机构 B 零件 C 部件 D 构件 2
一部机器一般由原动机、传动部分、工作机及控制部分组成, 本课程主要研究( )
A 原动机 B 传动部分 C 工作机 D 控制部分 三、填空题 1
构件是机械的运动单元体,零件是机械的______单元体
机械是______和______的总称
参考答案 一、判断题(正确 T,错误 F) 1
F 二、单项选择题 1
B 三、填空题 1
机构 机器 第一章 平面机构的自由度 一、判断题(正确 T,错误 F) 1
两构件通过点或线接触组成的运动副为低副
机械运动简图是用来表示机械结构的简单图形
两构件用平面低副联接时相对自由度为 1
将构件用运动副联接成具有确定运动的机构的条件是自由度数为 1
运动副是两构件之间具有相对运动的联接
对独立运动所加的限制称为约束
由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束 ( ) 8
在一个确定运动的机构中,计算自由度时主动件只能有一个
( ) 二、单项选择题 1
两构件通过( )接触组成的运动副称为高副
A 面 B 点或线 C 点或面 D 面或线 2
一般情况下,门与门框之间存在两个铰链,这属于( )
A 复合铰链 B 局部自由度 C