zl-矩形体的计算「需 E")公式中:m=VxSV=Lxhxw附录1
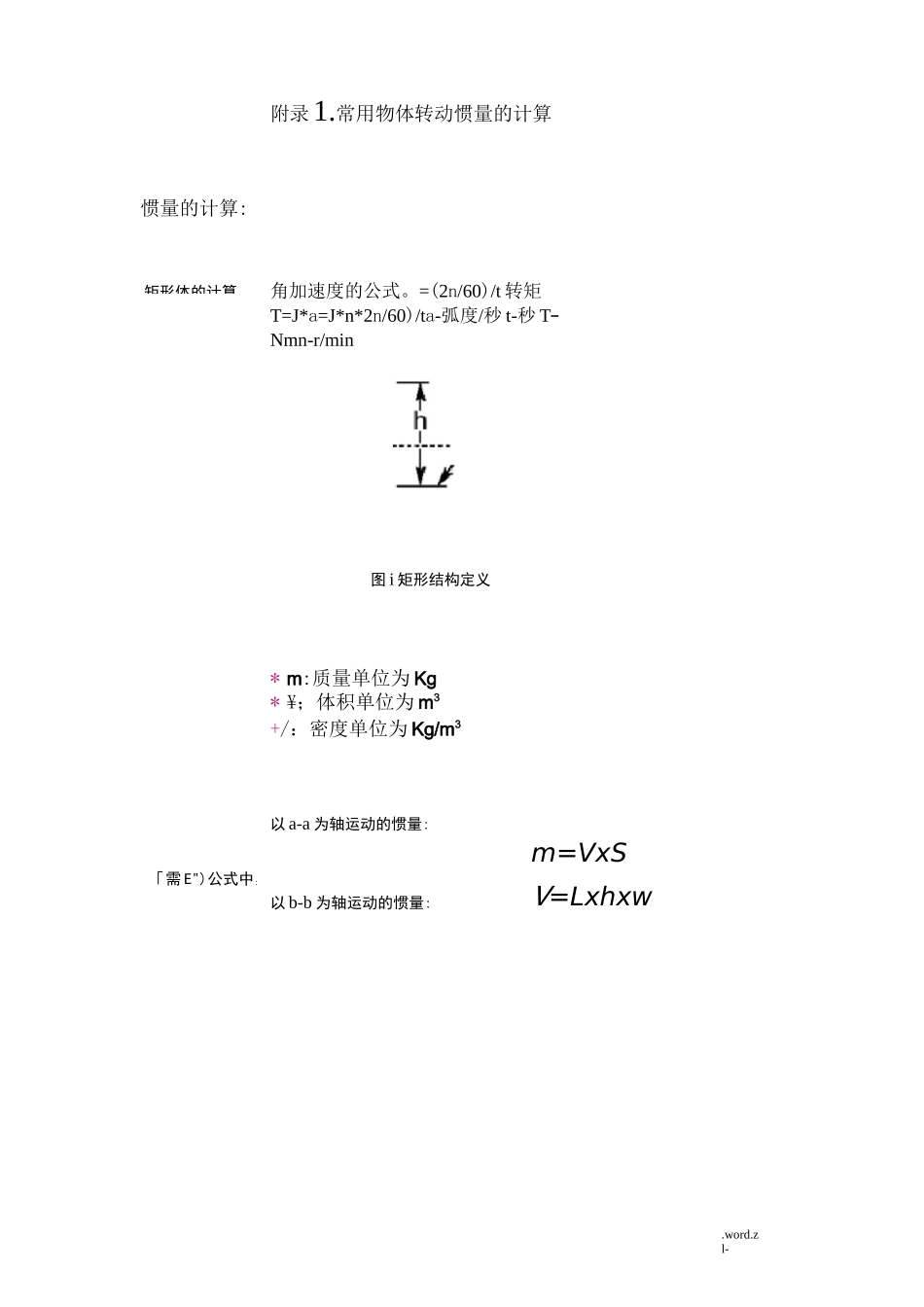
常用物体转动惯量的计算角加速度的公式
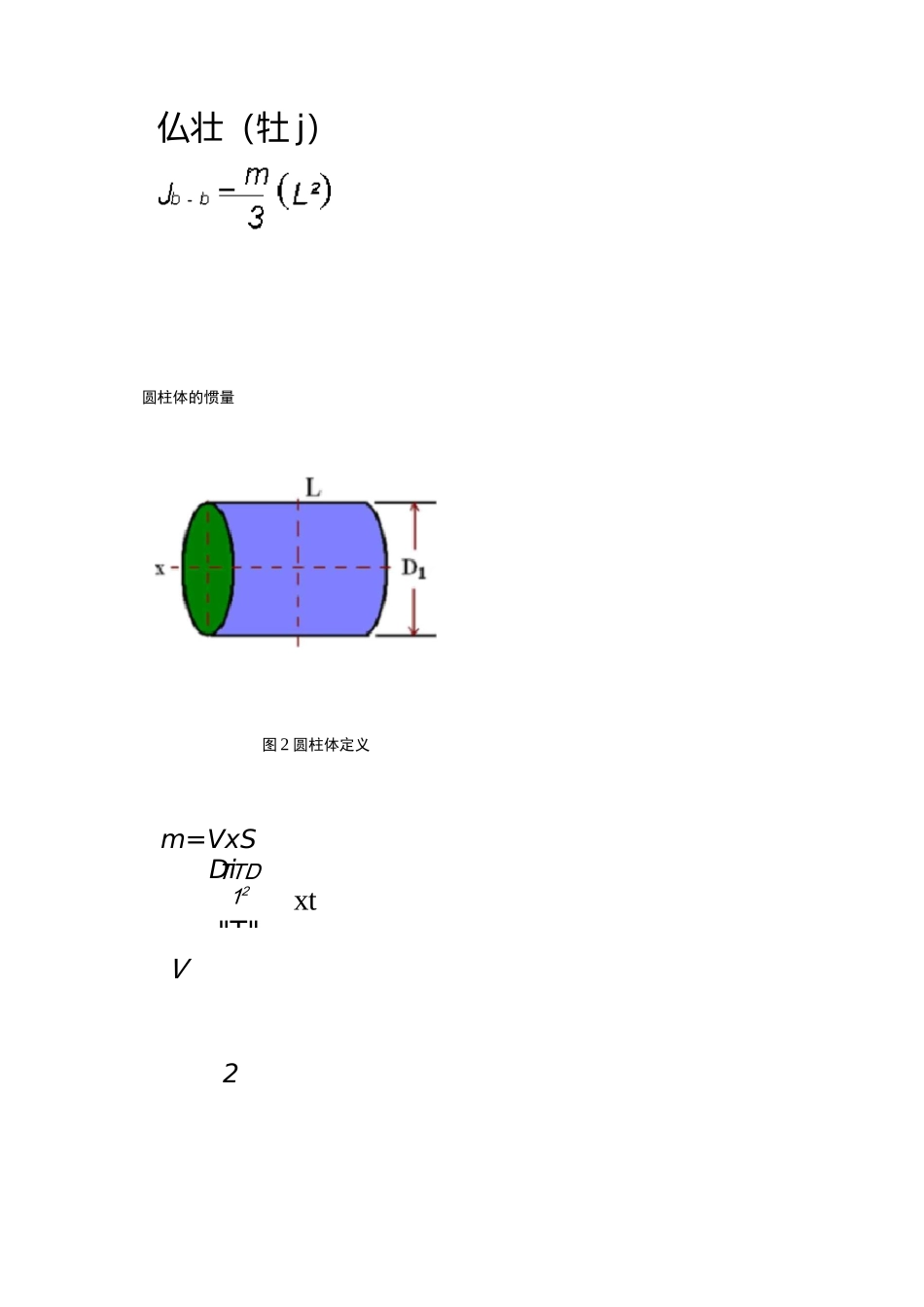
=(2n/60)/t 转矩T=J*a=J*n*2n/60)/ta-弧度/秒 t-秒 T-Nmn-r/min图 i 矩形结构定义* m:质量单位为 Kg* ¥;体积单位为 m3+/:密度单位为 Kg/m3以 a-a 为轴运动的惯量:以 b-b 为轴运动的惯量:惯量的计算:V2TTD12"T"xt仏壮(牡 j)圆柱体的惯量图 2 圆柱体定义m=VxSDi
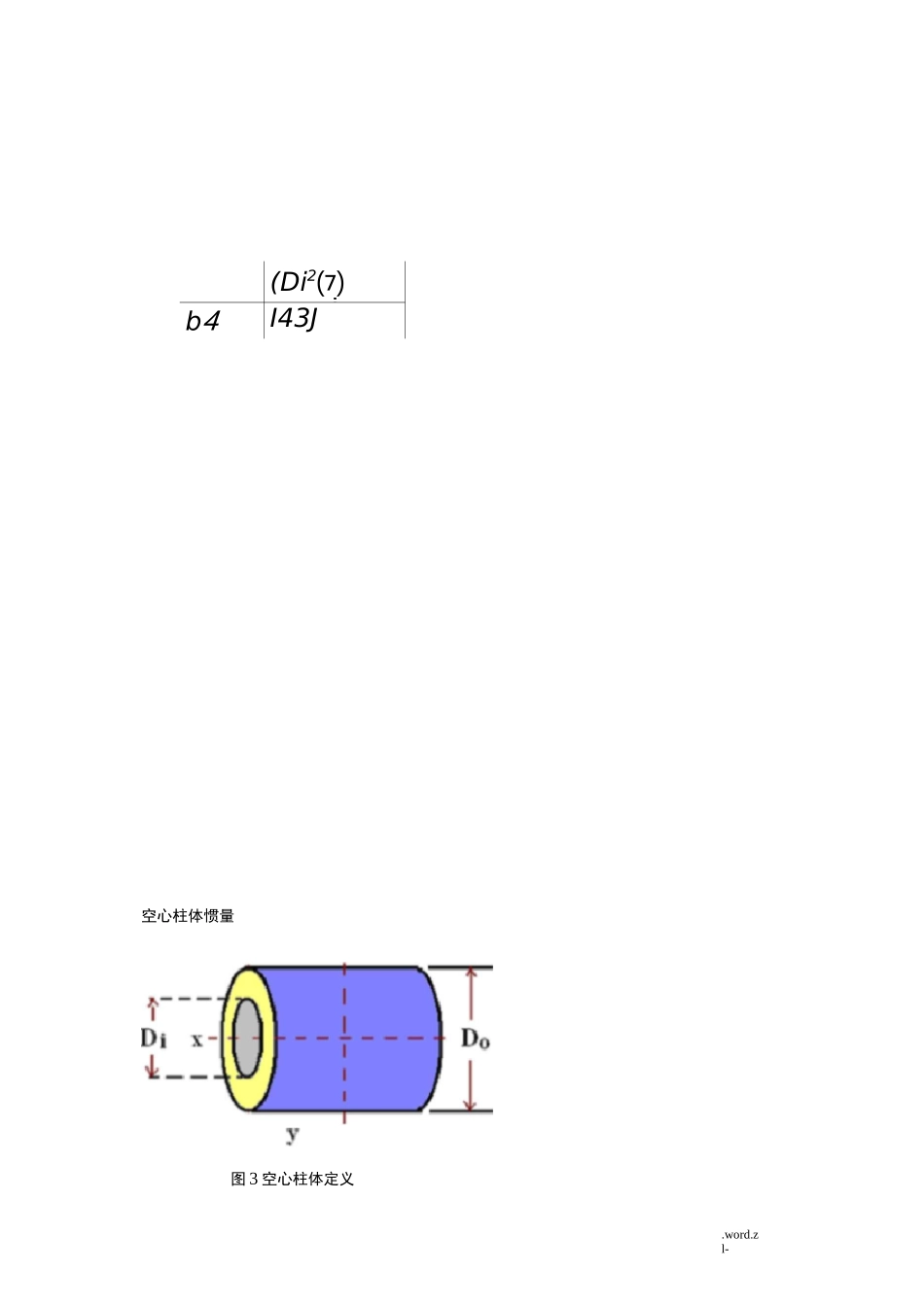
zl-(Di2⑺ib4I43J空心柱体惯量图 3 空心柱体定义m=VxSJx—mx(Do 2 +Di 2 ) 8m((^ 2 +D 2 )+L4I43
zl-摆臂的惯量图 4-1 摆臂 1 结构定义H图 4-2 摆臂 2 结构定义曲柄连杆的惯量m
zl-J=mR
+miri2图 5 曲柄连杆结构定义mi带减速机结构的惯量JM:电机惯量JL:负载惯量JL^M:负载惯量折算到电机側的惯量ML:负载转矩JR:减速机折算到输入的惯量R:减速比HR:瀟速机效率局=擘=^^Qflf=Rx8tCt)fw=Rxb)i
zl-GL(JOL■总惯量:■根据能量守恒定律:■折算到电机侧的力矩:图 6 带减速机结构定义
zl-JM:电机惯量 JL:负载惯量ML:负载力矩JPM:电切恻带轮惯量 DPM:电机侧带轮直径 NTM:电机侧带轮齿数 JpL:负载侧带轮惯量□PL:负载带轮直径 NTL:负载带轮齿数 n:减速机效率 mB:皮带质量图 7 齿形带传动结构=R'