精品文档---下载后可任意编辑1
1 MPC 定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束
简单来说,MPC 定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术
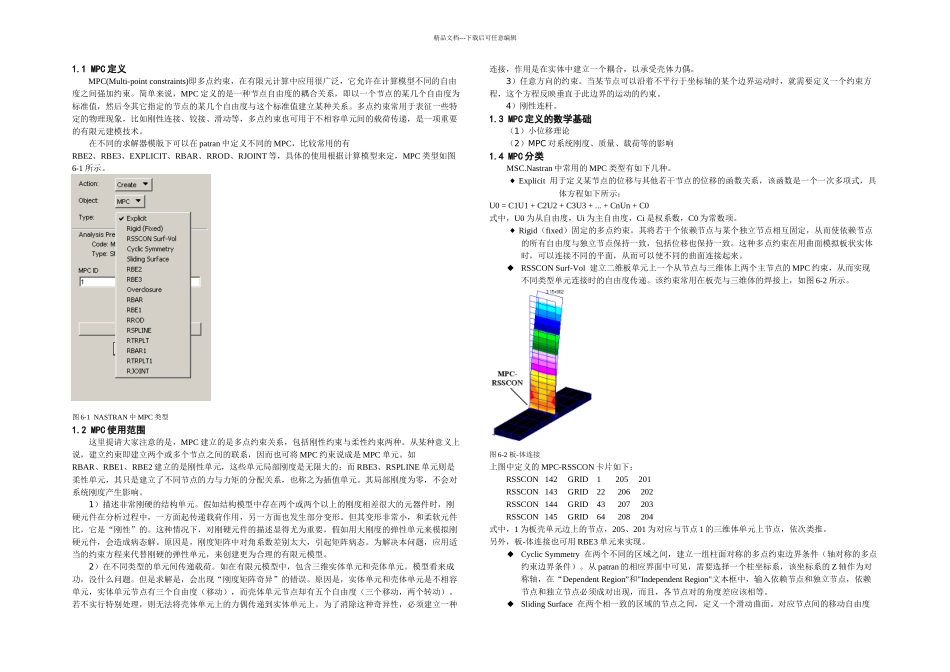
在不同的求解器模版下可以在 patran 中定义不同的 MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT 等,具体的使用根据计算模型来定,MPC 类型如图6-1 所示
图 6-1 NASTRAN 中 MPC 类型1
2 MPC 使用范围这里提请大家注意的是,MPC 建立的是多点约束关系,包括刚性约束与柔性约束两种
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将 MPC 约束说成是 MPC 单元
如RBAR、RBE1、RBE2 建立的是刚性单元,这些单元局部刚度是无限大的;而 RBE3、RSPLINE 单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元
其局部刚度为零,不会对系统刚度产生影响
1)描述非常刚硬的结构单元
假如结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形
但其变形非常小,和柔软元件比,它是“刚性”的
这种情况下,对刚硬元件的描述显得尤为重要,假如用大刚度的弹性单元来模拟刚硬元件,会造成病态解
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型
2)在不同类型的单元