单 片 机 课 程 设 计 系别:电子信息工程 班 级 :信100506 学号:信 1 0 0 5 0 6 0 1 姓名:徐彬彬 引言 制作一个基于51 单片机的控制的无线控制小车
一、 系统设计 由 51 单片机控制直流电机的正反转来控制小车的运动
无线部分用来接收上位机(电脑或者手机)发出的信号,通过信号控制单片机调用函数程序来控制小车的运行状态
无线部分:用蓝牙从机的TTL 接口接收信号反馈给单片机,还可以通过电脑的无线局域网网卡来控制路由器的TTL 串口来控制单片机的状态
由于蓝牙模块容易得到且接口方便,电压可以用+5V 控制,携带方便,便于在小车上安装
电机驱动:电机驱动需要大电流,较高的电压,考虑到单片机的负载能力,用 L298N 驱动模块来驱动电机,单片机输出逻辑信号控制L298N 模块输出正反向电压,由此控制电机的正反转
小车的运动状态:小车为四轮驱动,一侧的两个电机分为一组
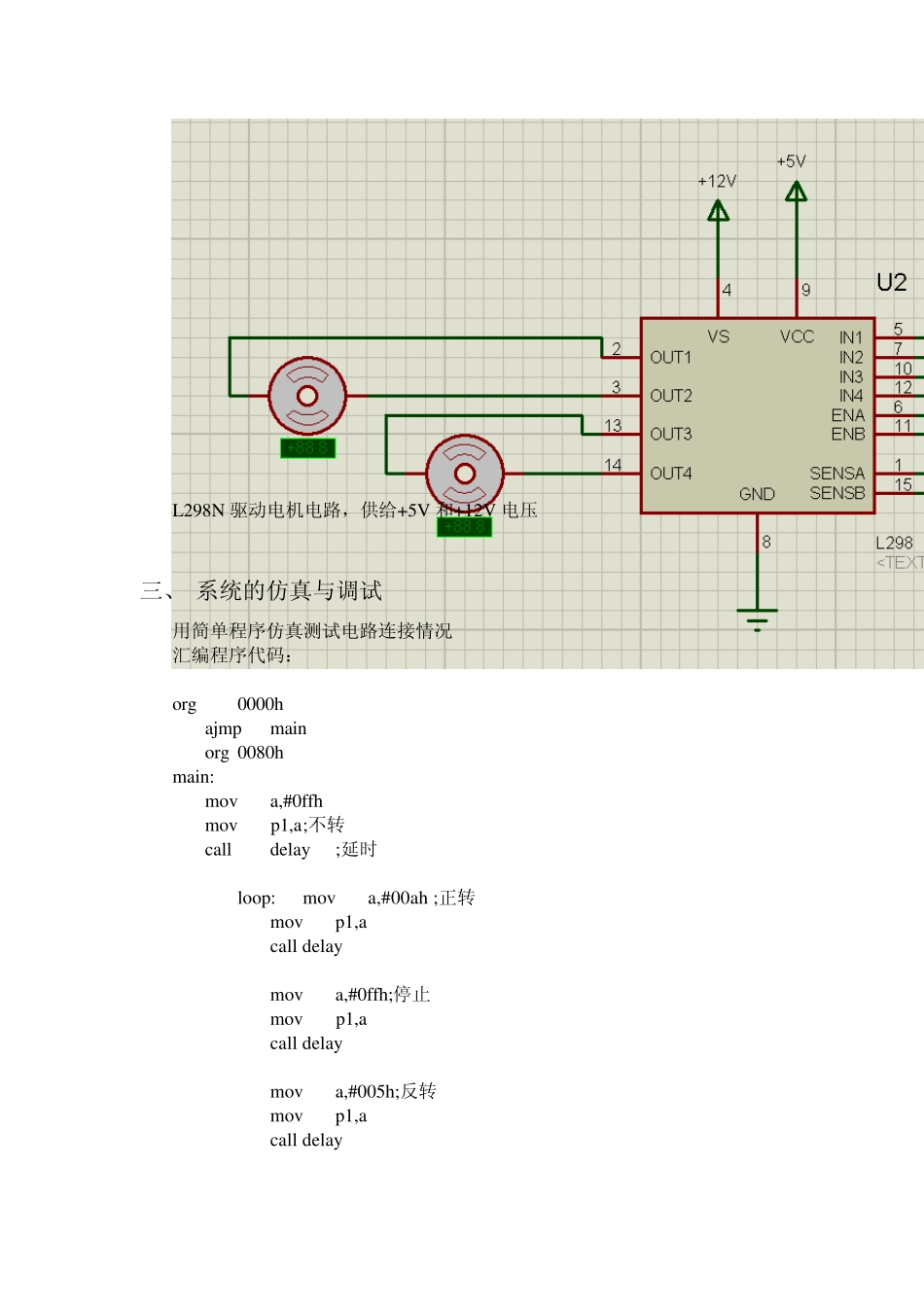
二、 软件设计 单片机电路: 由 p1 口输出逻辑电平驱动 L298N 电路 L298N 驱动电机电路,供给+5V 和+12V 电压 三、 系统的仿真与调试 用简单程序仿真测试电路连接情况 汇编程序代码: org 0000h ajmp main org 0080h main: mov a,#0ffh mov p1,a ;不转 call delay ;延时 loop: mov a,#00ah ;正转 mov p1,a call delay mov a,#0ffh;停止 mov p1,a call delay mov a,#005h;反转 mov p1,a call delay mov a,#0ffh;停止 mov p1,a call delay jmp loop delay: mov r5,#50 ;延时
d1: mov r6,#40 d2: mov r7,#248 djn