精品文档---下载后可任意编辑内容摘要 0第 1 章引言 1 . 1 步进电动机简介 1 . 2 设计任务及要求 控制要求 功能要求 性能要求 第 2 章系统总体方案设计 2 . 1 设计的基本思路 2 . 2 方案原理分析 2
1 步进电动机的驱动控制 2
2 步进电动机的调速控制 2
3 步进电动机的转向控制 第 3 章 PLC 控制系统设计 3
1 步进控制设计 3
2 控制流程图 3
3 输入输出编址 3
4 选择 PLC 类型 3
5 PLC 外部接线图 3
6 梯形图程序设计 3
7 控制语句表 3
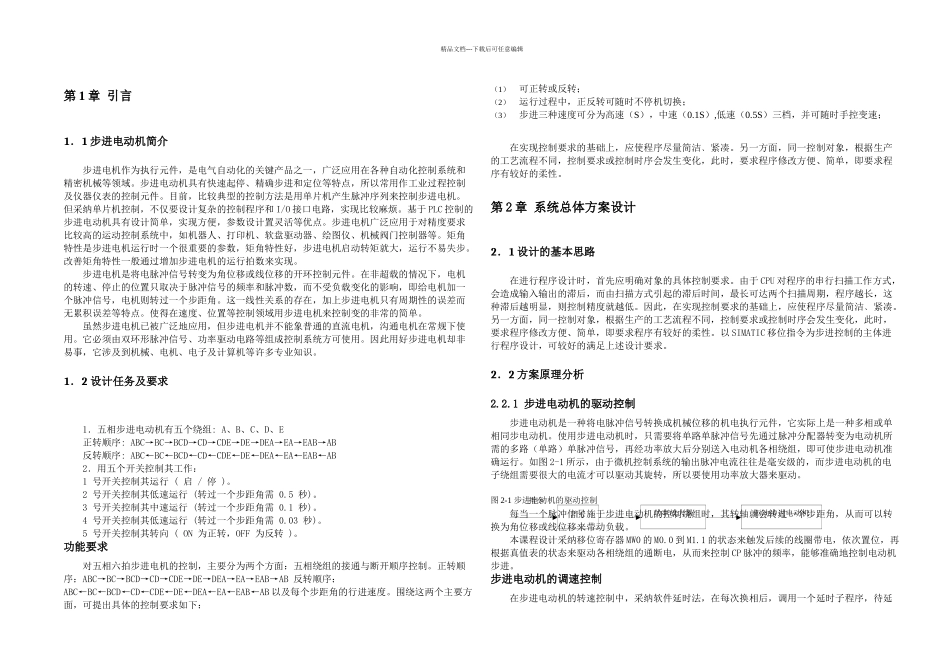
8 程序的调试 结论 设计总结 致谢 参考文献 PLC功率放大器驱动步进电动机指令精品文档---下载后可任意编辑第 1 章 引言1.1 步进电动机简介步进电机作为执行元件,是电气自动化的关键产品之一,广泛应用在各种自动化控制系统和精密机械等领域
步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表的控制元件
目前,比较典型的控制方法是用单片机产生脉冲序列来控制步进电机
但采纳单片机控制,不仅要设计复杂的控制程序和 I/O 接口电路,实现比较麻烦
基于 PLC 控制的步进电动机具有设计简单,实现方便,参数设计置灵活等优点
步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等
矩角特性是步进电机运行时一个很重要的参数,矩角特性好,步进电机启动转矩就大,运行不易失步
改善矩角特性一般通过增加步进电机的运行拍数来实现
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点