精品文档---下载后可任意编辑二级倒立摆是一个复杂的,不稳定的高阶非线性系统,国内外对此做过很多讨论
倒立摆之所以引起人们广泛的兴趣,是因为许多被控对象都可以抽象成为倒立摆模型,在很多领域有着广泛的应用如机器人,航天领域等
倒立摆装置被公认为自动控制理论中的典型实验设备,也是控制理论教学和科研中的典型物理模型
倒立摆本身是一个自然不稳定体,在控制过程中能够有效地反映控制中的许多关键问题,如稳定性问题,非线性问题,鲁棒性问题,随动问题以及跟踪问题等都可以用倒立摆为例加以讨论
通过对它的讨论不仅可以解决控制中的理论和技术实现问题,还能将控制理论涉及的主要基础学科:力学,数学和计算机科学进行有机的终合应用
倒立摆的讨论不仅有其深刻的理论意义,还有重要的工程背景
在多种控制理论与方法的讨论与应用中,特别是在工程实践中,也存在一种可行性的实验问题,使其理论与方法得到有效检验,倒立摆就能为此提供一个从理论通往实践的桥梁,由于倒立摆系统与火箭飞行和双足步行机器人的行走有很大的相似性,因此倒立摆的讨论对于火箭飞行和机器人的控制等现代高新技术的讨论具有重要的实践意义
目前,对倒立摆的讨论己经引起国内外学者的广泛关注,是控制领域讨论的热门课题之一
摘要倒立摆系统的控制讨论长期以来被认为是控制理论及其应用领域里引起人们极大兴趣的问题
它是检验各种新的控制理论和方法的有效性的著名实验装置
作为一个高阶、非线性不稳定系统,倒立摆的稳定控制相当困难,对该领域的学者来说是一个极具挑战性的难题
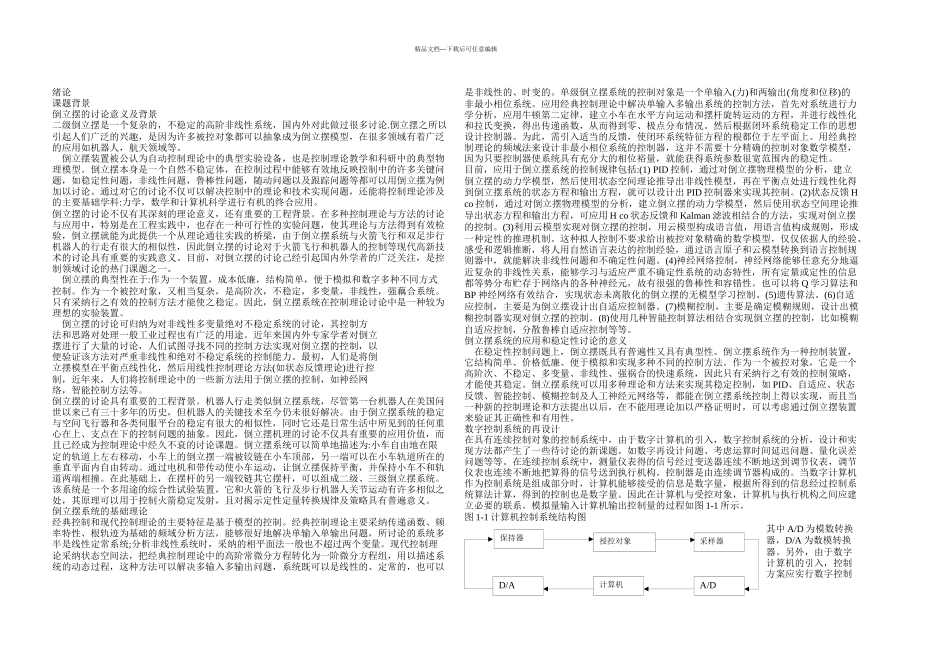
当数字计算机构成系统的一个组成部分时,需要对连续的控制对象设计数字控制器
本文在阐述了倒立摆系统控制的讨论进展过程和现状之后,介绍了倒立摆系统的结构和数学模型,并根据闭环连续系统与其离散系统之间应遵循的某种等价关系,综述了数字控制系统的再设计问题
并且应用这种方法对二级倒立摆系统进行了数字仿真和实时控制,验证了这种