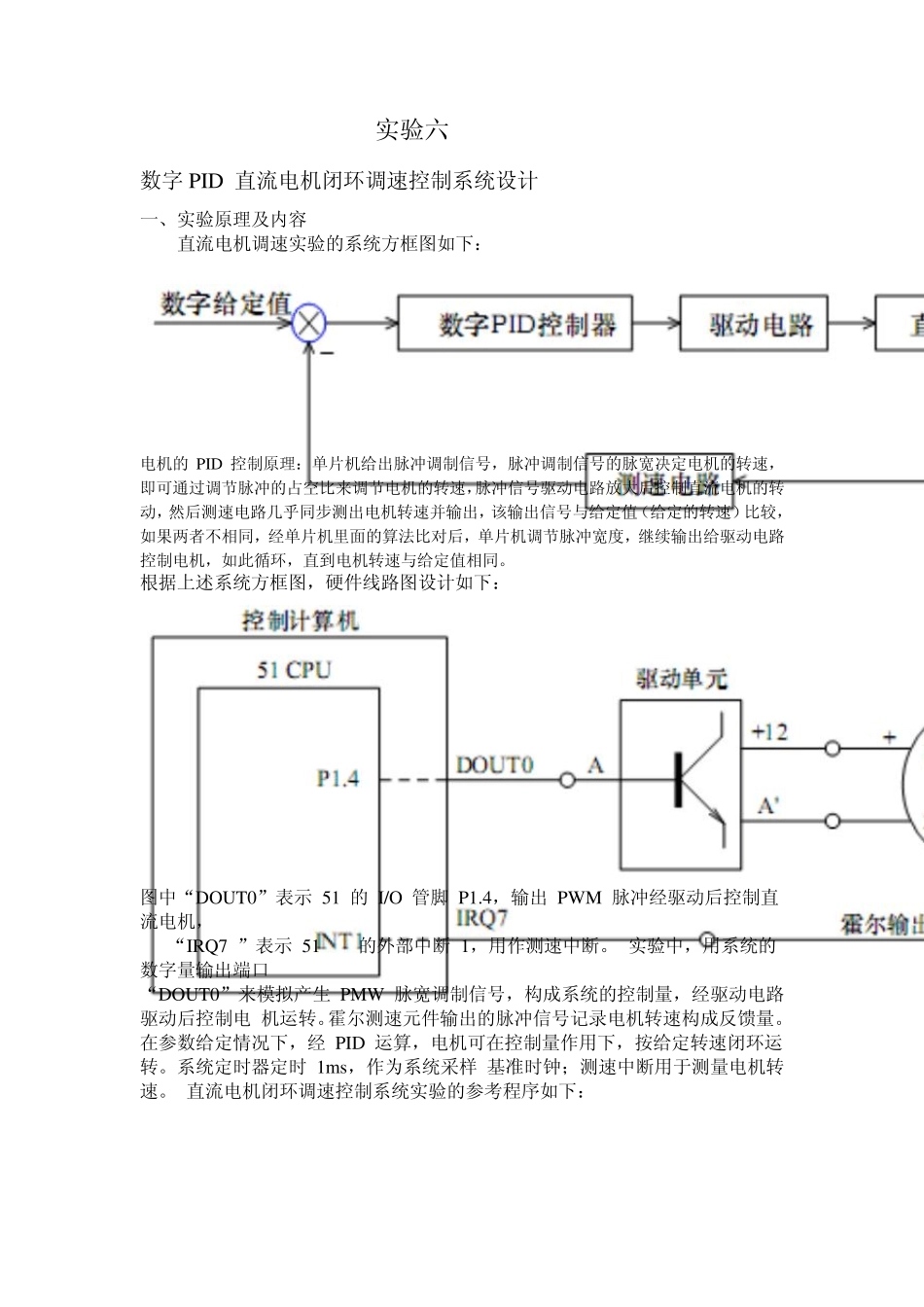
实验六 数字PID 直流电机闭环调速控制系统设计 一、实验原理及内容 直流电机调速实验的系统方框图如下: 电机的PID 控制原理:单片机给出脉冲调制信号,脉冲调制信号的脉宽决定电机的转速,即可通过调节脉冲的占空比来调节电机的转速,脉冲信号驱动电路放大后控制直流电机的转动,然后测速电路几乎同步测出电机转速并输出,该输出信号与给定值(给定的转速)比较,如果两者不相同,经单片机里面的算法比对后,单片机调节脉冲宽度,继续输出给驱动电路控制电机,如此循环,直到电机转速与给定值相同
根据上述系统方框图,硬件线路图设计如下: 图中“DOUT0”表示 51 的 I/O 管脚 P1
4,输出 PWM 脉冲经驱动后控制直流电机, “IRQ7 ”表示 51 的外部中断 1,用作测速中断
实验中,用系统的数字量输出端口 “DOUT0”来模拟产生 PMW 脉宽调制信号,构成系统的控制量,经驱动电路驱动后控制电 机运转
霍尔测速元件输出的脉冲信号记录电机转速构成反馈量
在参数给定情况下,经 PID 运算,电机可在控制量作用下,按给定转速闭环运转
系统定时器定时 1ms,作为系统采样 基准时钟;测速中断用于测量电机转速
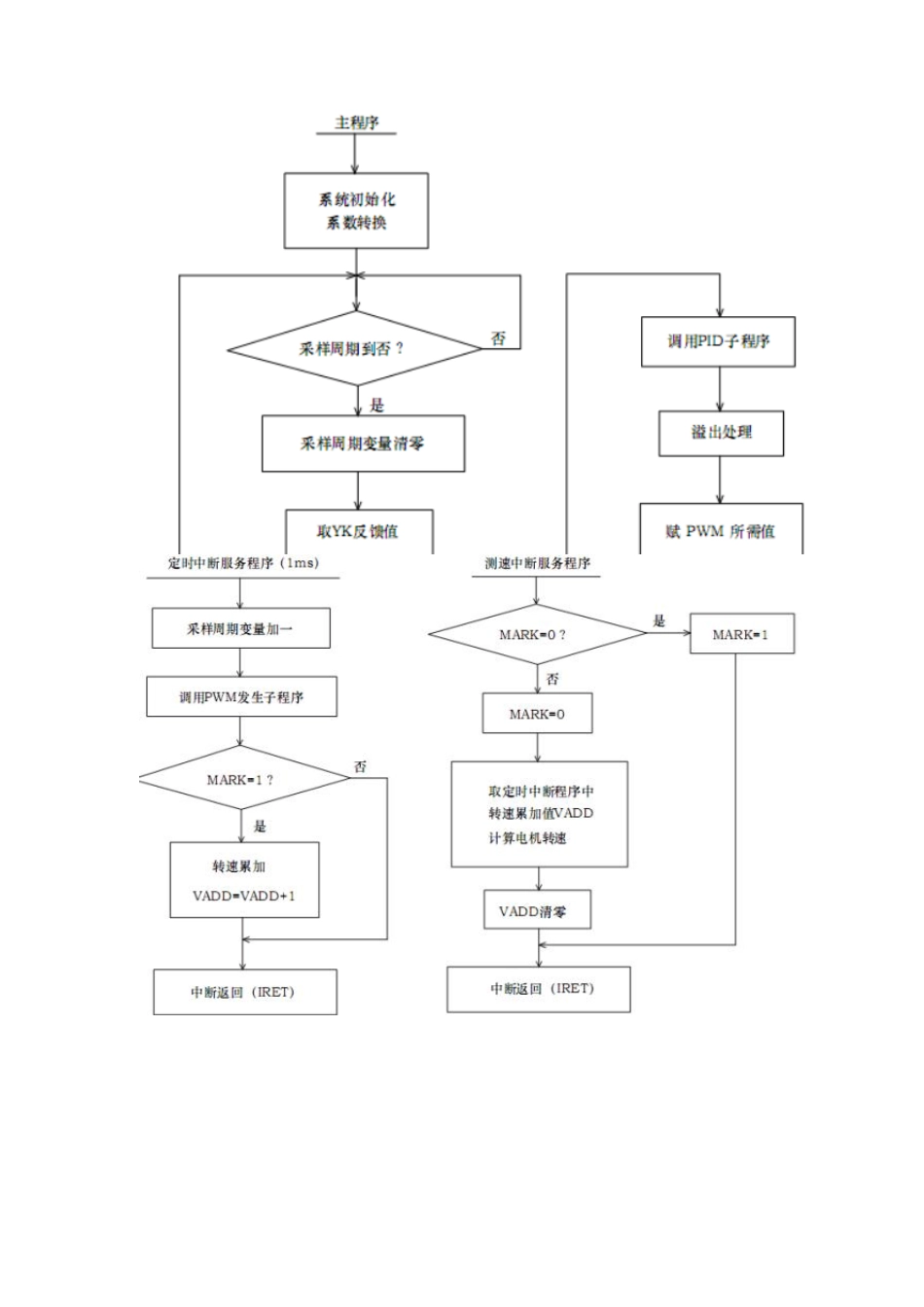
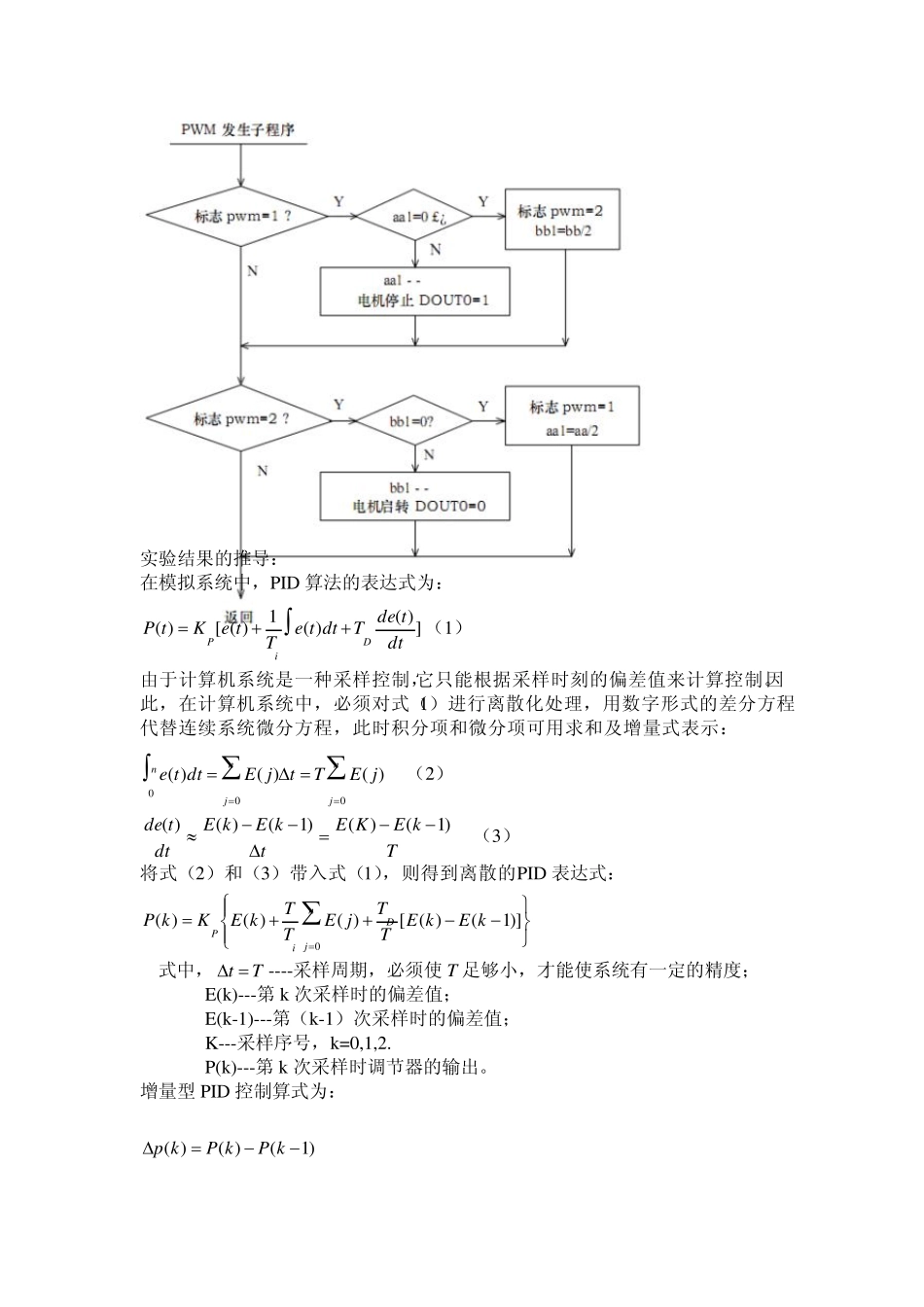
直流电机闭环调速控制系统实验的参考程序如下: 实验结果的推导: 在模拟系统中,PID 算法的表达式为: ])()(1)([)(dttdeTdtteTteKtPDiP(1) 由于计算机系统是一种采样控制,它只能根据采样时刻的偏差值来计算控制
因此,在计算机系统中,必须对式(1)进行离散化处理,用数字形式的差分方程代替连续系统微分方程,此时积分项和微分项可用求和及增量式表示:njnjnjETtjEdtte000)()()( (2) TkEKEtkEkEdttde)1()()1()()( (3) 将式(2)和(3)带入式(1),则得到离散的PID 表