实验目的: 图像拼接的目的是将有衔接重叠的图像拼成一张高分辨率全景图像,它是计算机视觉、图像处理和计算机图形学等多学科的综合应用技术
图像拼接技术是指将对同一场景、不同角度之间存在相互重叠的图像序列进行图像配准,然后再把图像融合成一张包含各图像信息的高清图像的技术
本实验是根据输入的只有旋转的一系列图像序列,经过匹配,融合后生成一张360度的全景图像
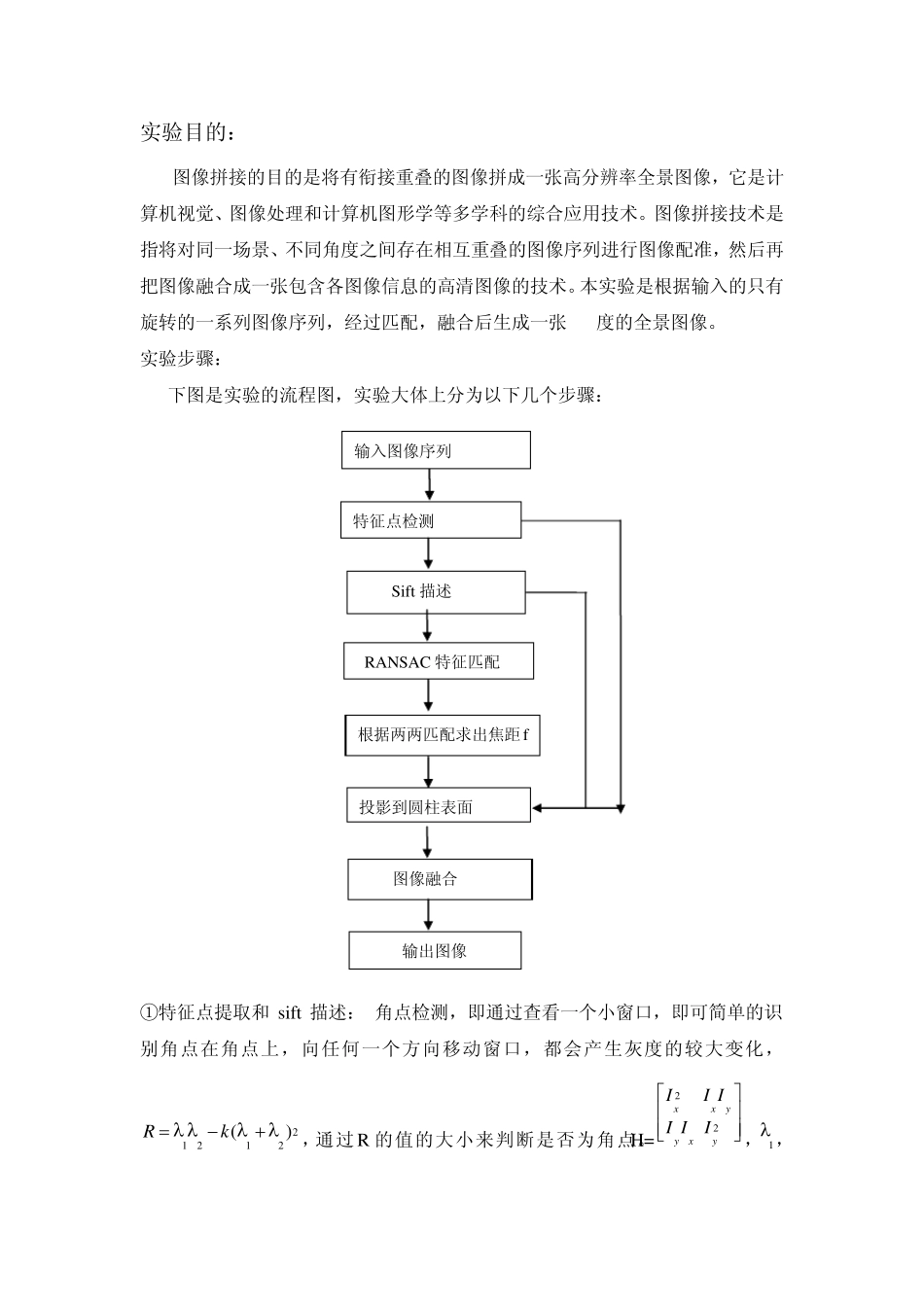
实验步骤: 下图是实验的流程图,实验大体上分为以下几个步骤: ①特征点提取和sift 描述: 角点检测,即通过查看一个小窗口,即可简单的识别角点在角点上,向任何一个方向移动窗口,都会产生灰度的较大变化,21212()Rk,通过R 的值的大小来判断是否为角点
H=22xx yy xyII II II ,1 ,输入图像序列 特征点检测 Sift描述 RANSAC 特征匹配 根据两两匹配求出焦距f 投影到圆柱表面 图像融合 输出图像 2 为矩阵的两个特征值
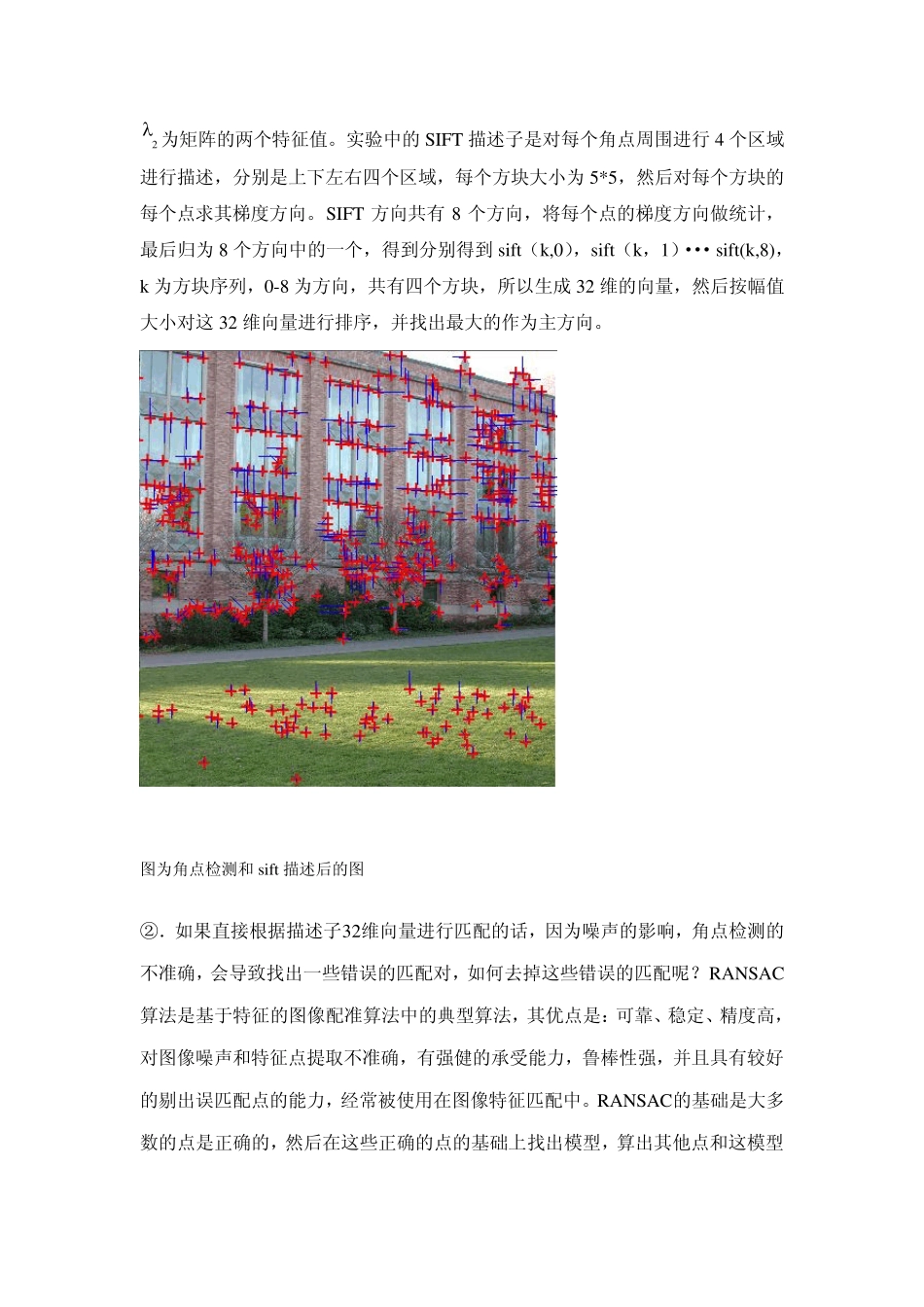
实验中的SIFT 描述子是对每个角点周围进行4 个区域进行描述,分别是上下左右四个区域,每个方块大小为5*5,然后对每个方块的每个点求其梯度方向
SIFT 方向共有8 个方向,将每个点的梯度方向做统计,最后归为8 个方向中的一个,得到分别得到sift(k,0),sift(k,1)···sift(k,8), k 为方块序列,0-8 为方向,共有四个方块,所以生成 32 维的向量,然后按幅值大小对这 32 维向量进行排序,并找出最大的作为主方向
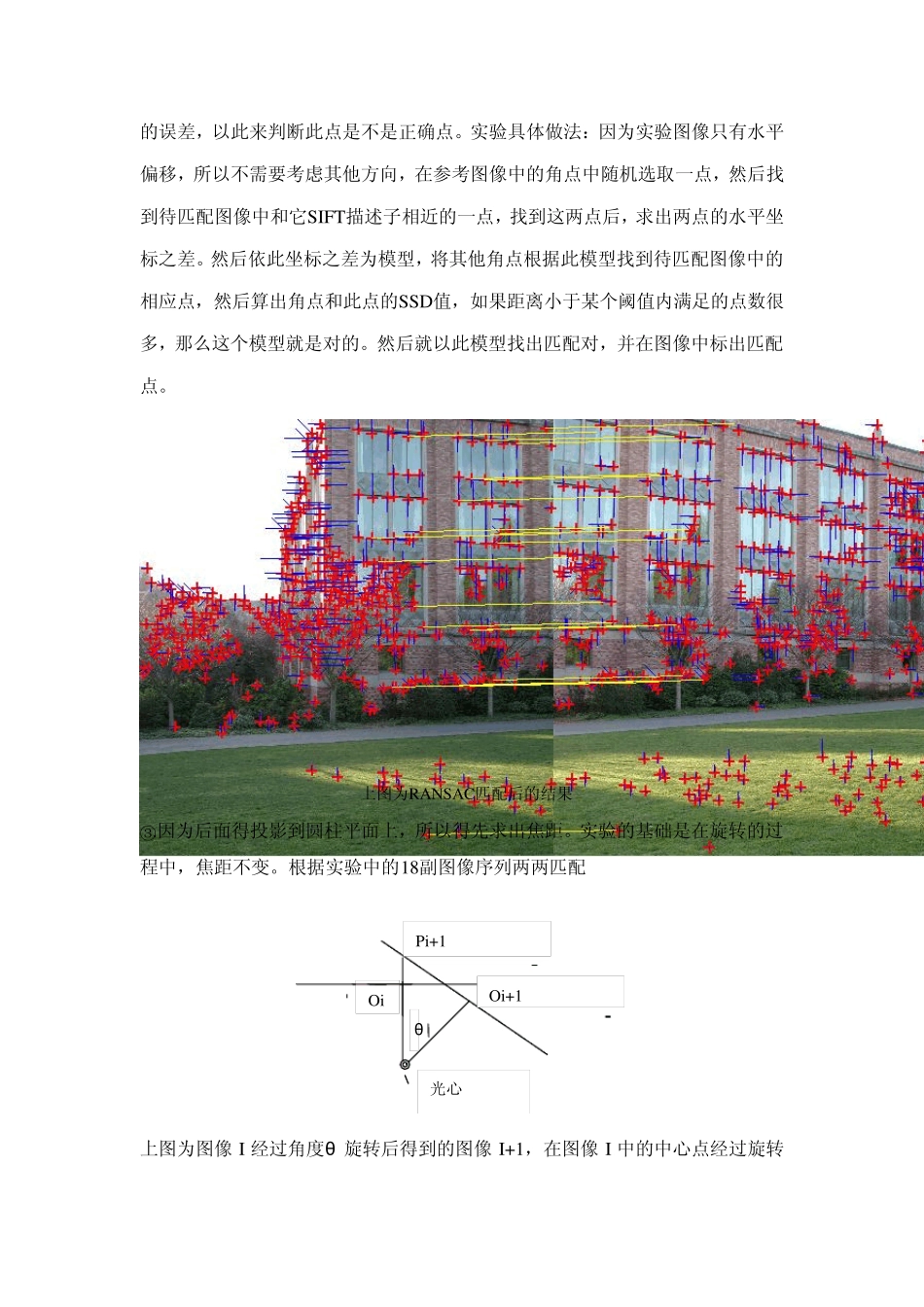
图为角点检测和 sift描述后的图 ②.如果直接根据描述子32维向量进行匹配的话,因为噪声的影响,角点检测的不准确,会导致找出一些错误的匹配对,如何去掉这些错误的匹配呢
RANSAC算法是基于特征的图像配准算法中的典型算法,其优点是:可靠、稳定、精度高,对图像噪声和特征点提取不准确,有强健的承受能力,鲁棒