ABB 机器人内部培训一.手动操纵工业机器人1
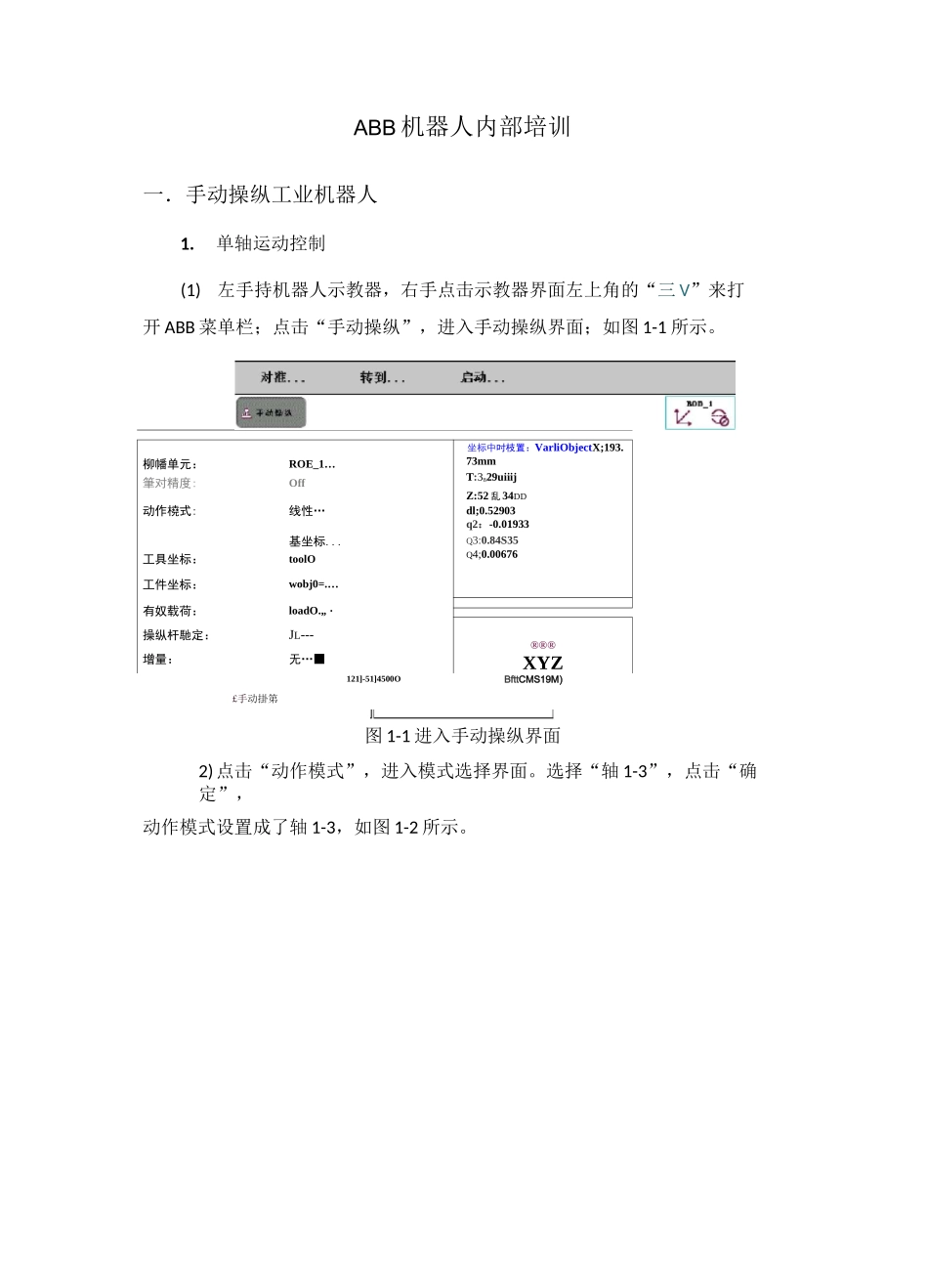
单轴运动控制(1)左手持机器人示教器,右手点击示教器界面左上角的“三 V”来打开 ABB 菜单栏;点击“手动操纵”,进入手动操纵界面;如图 1-1 所示
柳幡单元:ROE_1…坐标中吋枝置:VarliObjectX;193
73mm筆对精度:OffT:3B29uiiij动作橈式:线性…Z:52 乱 34DDdl;0
52903基坐标
01933Q3:0
84S35工具坐标:toolOQ4;0
00676工件坐标:wobj0=
…有奴载荷:loadO
„・操纵杆馳定:JL---®®®增量:无…■XYZ图 1-1 进入手动操纵界面2)点击“动作模式”,进入模式选择界面
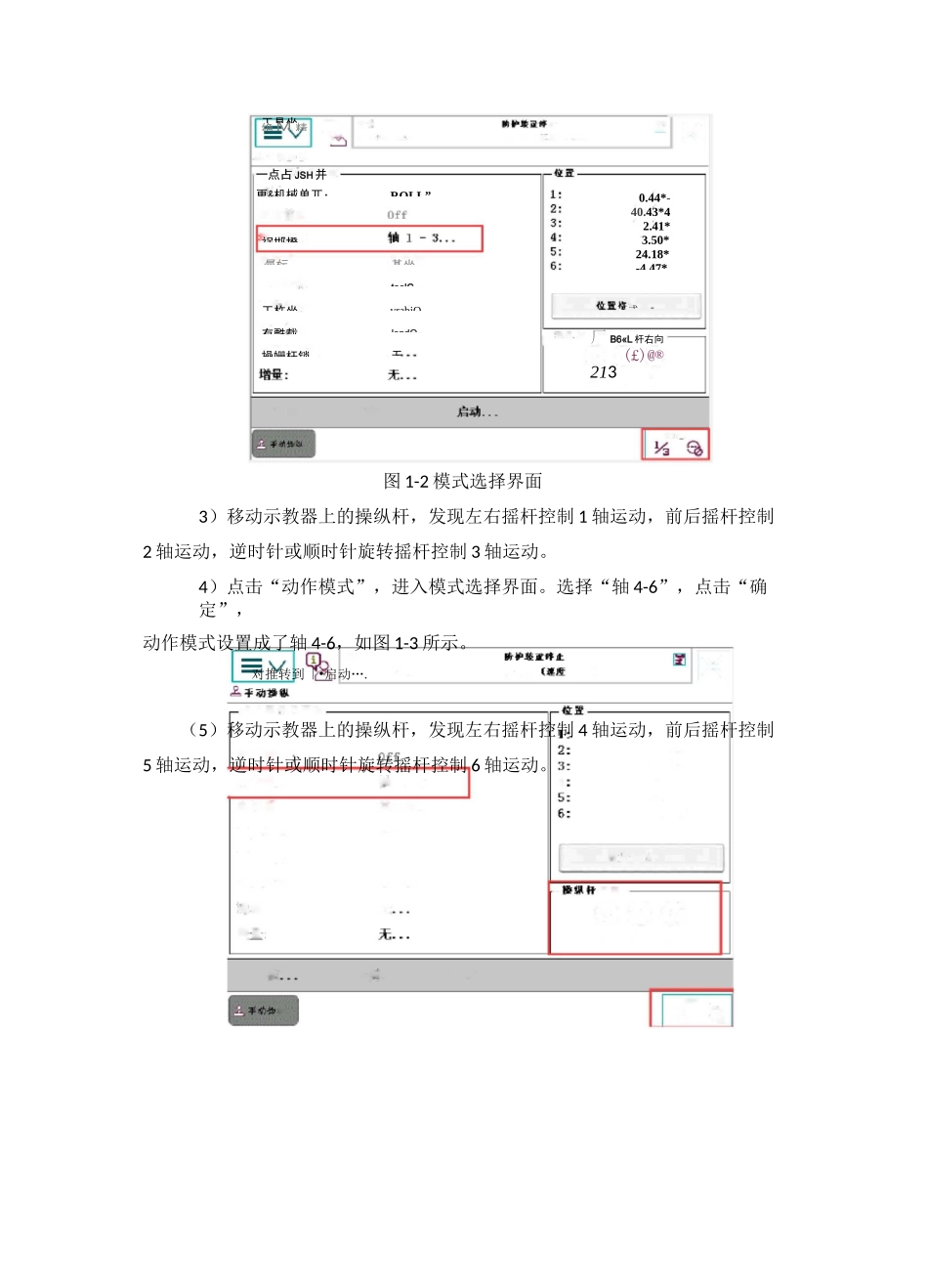
选择“轴 1-3”,点击“确定”,动作模式设置成了轴 1-3,如图 1-2 所示
BfttCMS19M)121]-51]4500O£手动掛第卫手动掛承对准…转到…EDD11±0-5[»43«5()已阿止 1M*)机檢单元:ROE」
|动作模式:轴 4f
坐标系:基坐标…0
44°-40
18r747*工具坐标:tcclO
工件坐标:wcbjO
有赴载荷:1aadO
操皴杆锲定:塔虽:-方阿一®Q®546纵图 1-3“动作模式”的选择BOE_1%电图 1-2 模式选择界面3)移动示教器上的操纵杆,发现左右摇杆控制 1 轴运动,前后摇杆控制2 轴运动,逆时针或顺时针旋转摇杆控制 3 轴运动
4)点击“动作模式”,进入模式选择界面
选择“轴 4-6”,点击“确定”,动作模式设置成了轴 4-6,如图 1-3 所示
对推转到「•启动…
(5)移动示教器上的操纵杆,发现左右摇杆控制 4 轴运动,前后摇杆控制5 轴运动,逆时针或顺时针旋转摇杆控制 6 轴运动
无ROLL”绝M 精祸邯揆曼标基坐工具坐toolC-