甘A1阿克曼原理与矩形化转向梯形设计一、阿克曼原理阿克曼原理的基本观点是:汽车在行驶(直线行驶和转弯行驶)过程中,每个车轮的运动轨迹,都必须完全符合它的自然运动轨迹,从而保证轮胎与地面间处于纯滚动而无滑移现象
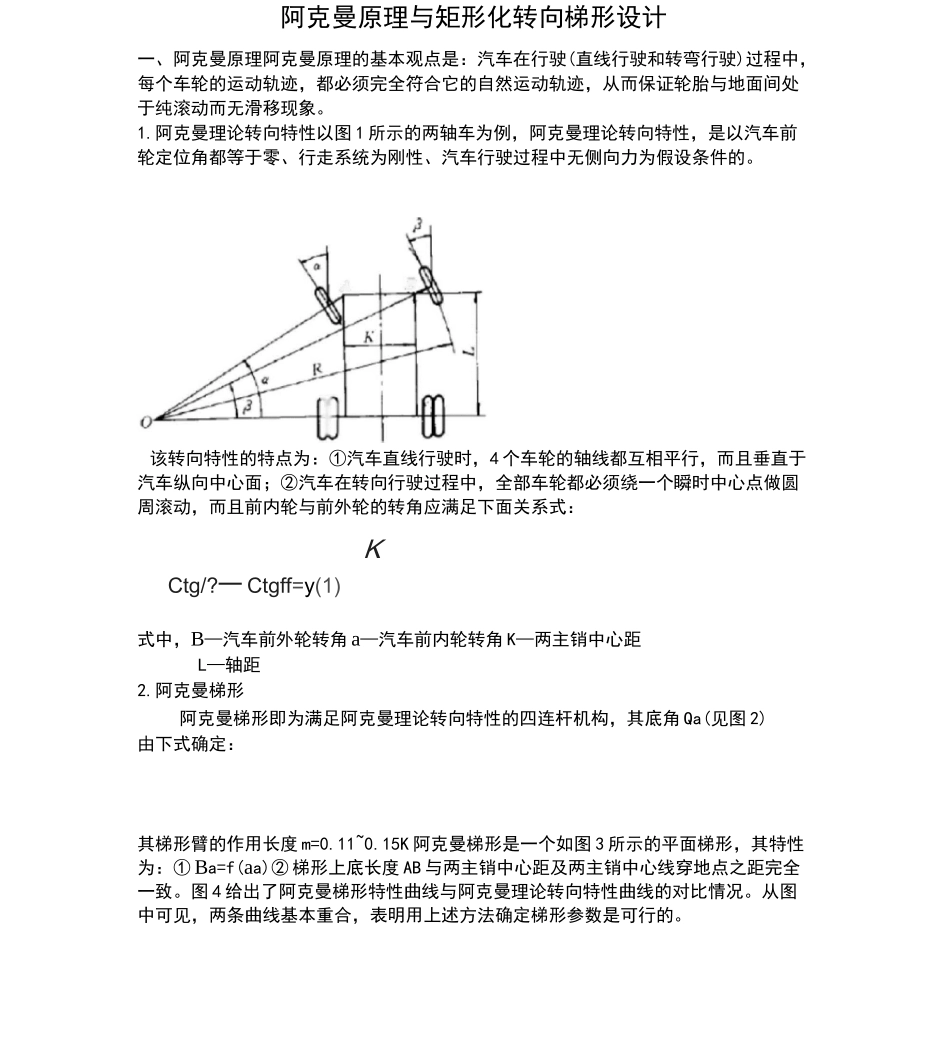
阿克曼理论转向特性以图 1 所示的两轴车为例,阿克曼理论转向特性,是以汽车前轮定位角都等于零、行走系统为刚性、汽车行驶过程中无侧向力为假设条件的
该转向特性的特点为:①汽车直线行驶时,4 个车轮的轴线都互相平行,而且垂直于汽车纵向中心面;②汽车在转向行驶过程中,全部车轮都必须绕一个瞬时中心点做圆周滚动,而且前内轮与前外轮的转角应满足下面关系式:KCtg/
一 Ctgff=y(1)式中,B—汽车前外轮转角 a—汽车前内轮转角 K—两主销中心距L—轴距2
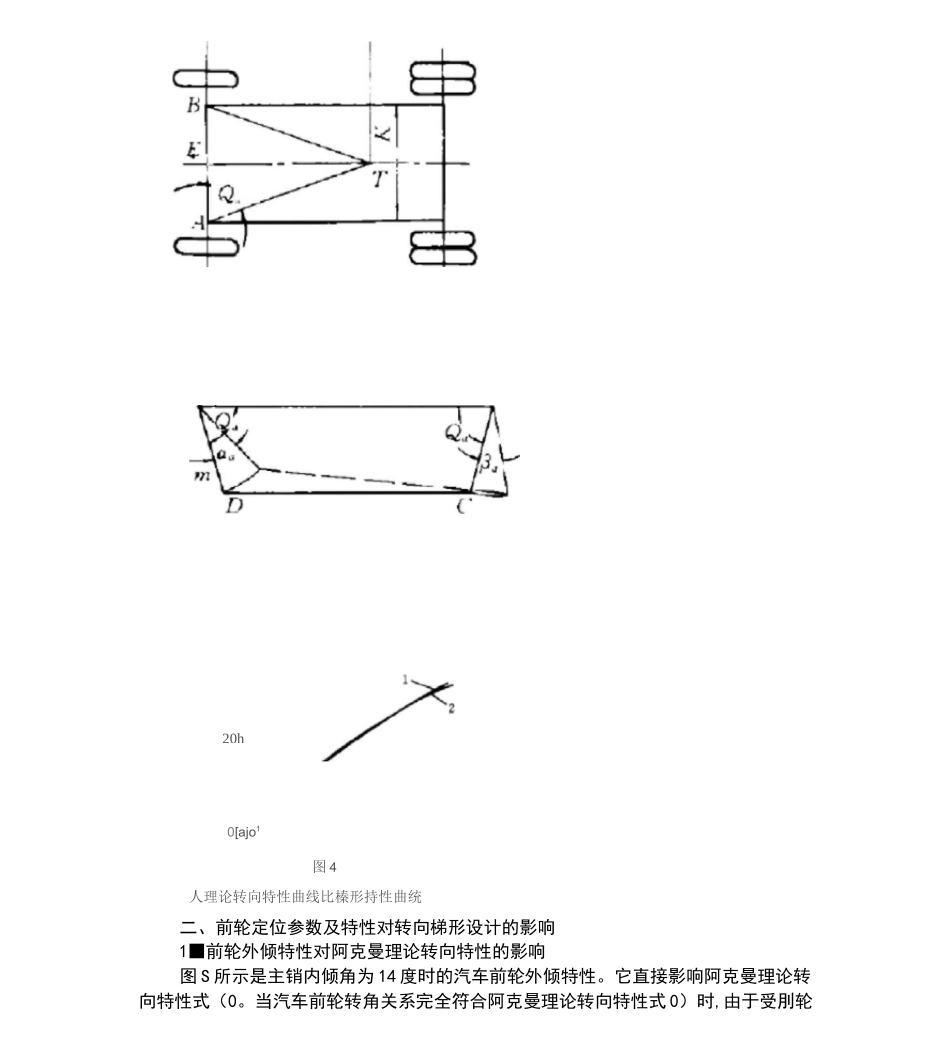
阿克曼梯形阿克曼梯形即为满足阿克曼理论转向特性的四连杆机构,其底角 Qa(见图 2)由下式确定:其梯形臂的作用长度 m=0
15K 阿克曼梯形是一个如图 3 所示的平面梯形,其特性为:① Ba=f(aa)② 梯形上底长度 AB 与两主销中心距及两主销中心线穿地点之距完全一致
图 4 给出了阿克曼梯形特性曲线与阿克曼理论转向特性曲线的对比情况
从图中可见,两条曲线基本重合,表明用上述方法确定梯形参数是可行的
20h0[ajo1图 4人理论转向特性曲线比榛形持性曲统二、前轮定位参数及特性对转向梯形设计的影响1■前轮外倾特性对阿克曼理论转向特性的影响图 S 所示是主销内倾角为 14 度时的汽车前轮外倾特性
它直接影响阿克曼理论转向特性式(0
当汽车前轮转角关系完全符合阿克曼理论转向特性式 0)时,由于受刖轮外倾的影响,使汽车刖轮的自然运动轨迹与实际运动轨迹不吻合,如图 6 所示
因此,要想满足阿克曼原理的要求,必须减少内、外轮的转角差,即汽车理论转向特性应为:ctg(/
)—ctg(a+Act)=H(3)