计算机视觉摄像机标定实验报告 [实验名称] 基于OpenCV 的摄像机标定 [实验项目] 1、 学会使用 OpenCV 2、利用 OpenCV 进行摄像机标定,编程实现,给出实验结果及其分析
[实验仪器设备]电脑+Visu al Stu dio 2010+openCV
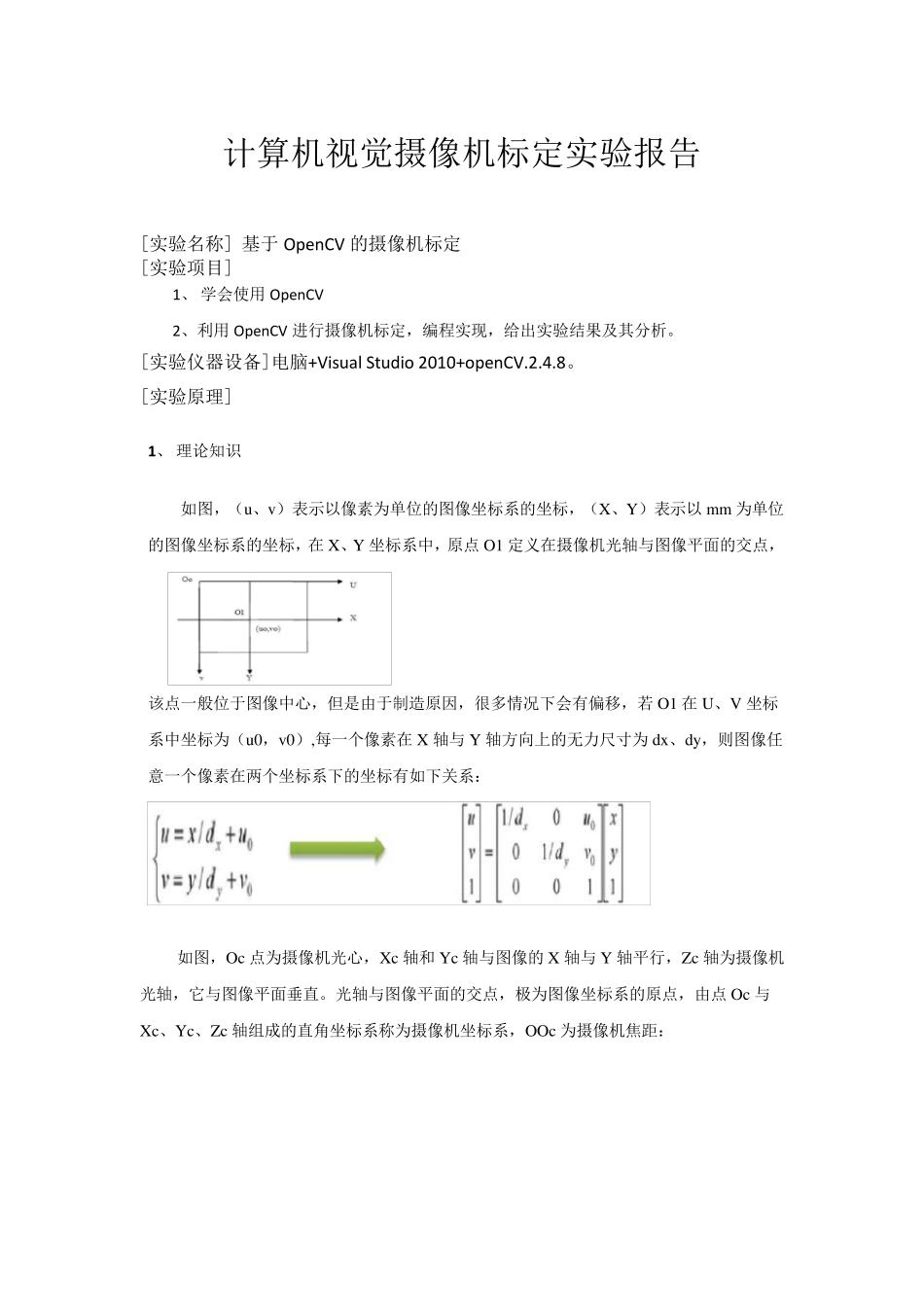
[实验原理] 1 、 理论知识 如图,(u、v)表示以像素为单位的图像坐标系的坐标,(X、Y)表示以 mm 为单位的图像坐标系的坐标,在 X、Y 坐标系中,原点 O1 定义在摄像机光轴与图像平面的交点,该点一般位于图像中心,但是由于制造原因,很多情况下会有偏移,若 O1 在 U、V 坐标系中坐标为(u0,v0),每一个像素在 X 轴与 Y 轴方向上的无力尺寸为 dx、dy,则图像任意一个像素在两个坐标系下的坐标有如下关系: 如图,Oc 点为摄像机光心,Xc 轴和 Yc 轴与图像的X 轴与 Y 轴平行,Zc 轴为摄像机光轴,它与图像平面垂直
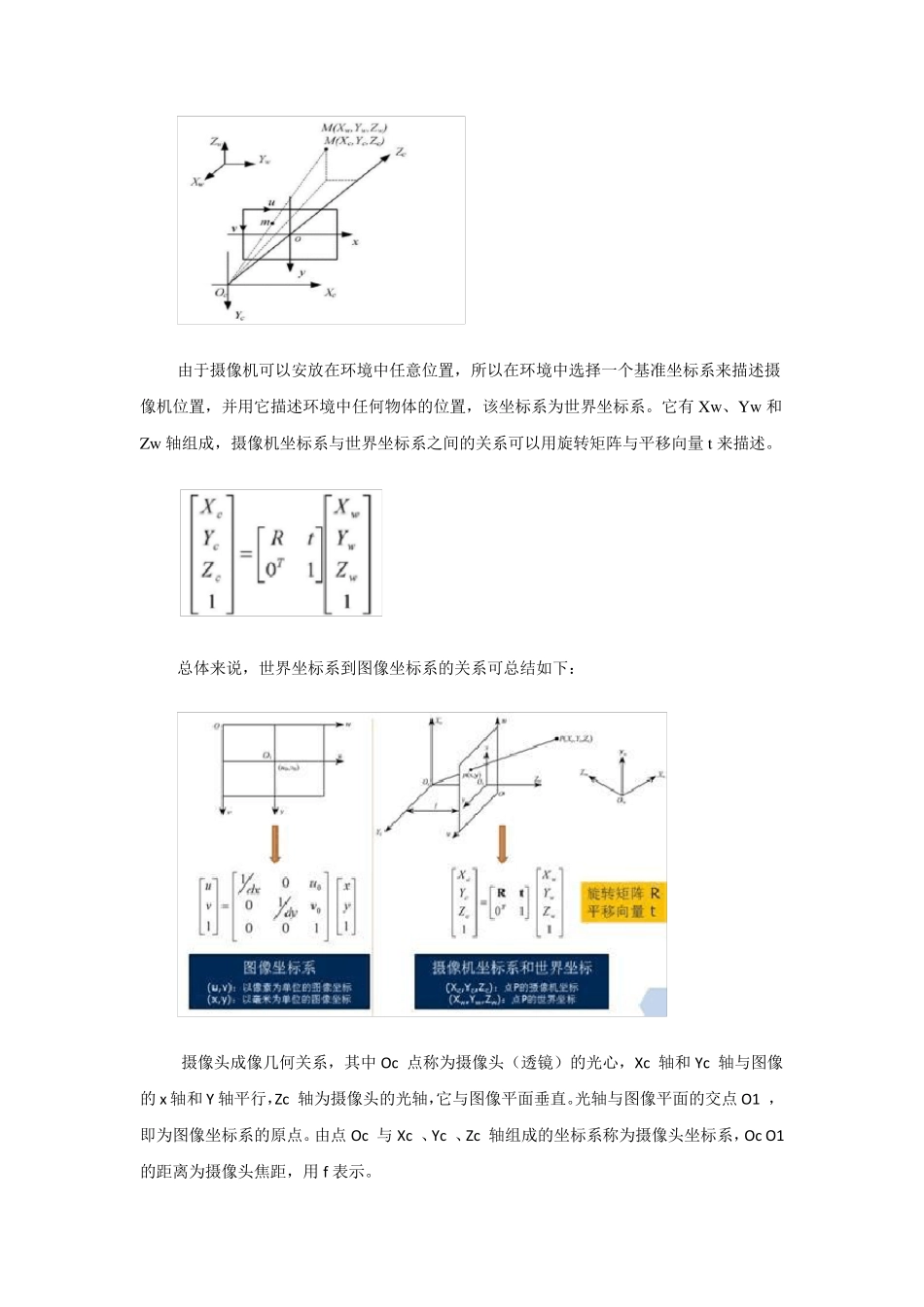
光轴与图像平面的交点,极为图像坐标系的原点,由点 Oc 与Xc、Yc、Zc 轴组成的直角坐标系称为摄像机坐标系,OOc 为摄像机焦距: 由于摄像机可以安放在环境中任意位置,所以在环境中选择一个基准坐标系来描述摄像机位置,并用它描述环境中任何物体的位置,该坐标系为世界坐标系
它有Xw 、Yw 和Zw 轴组成,摄像机坐标系与世界坐标系之间的关系可以用旋转矩阵与平移向量 t 来描述
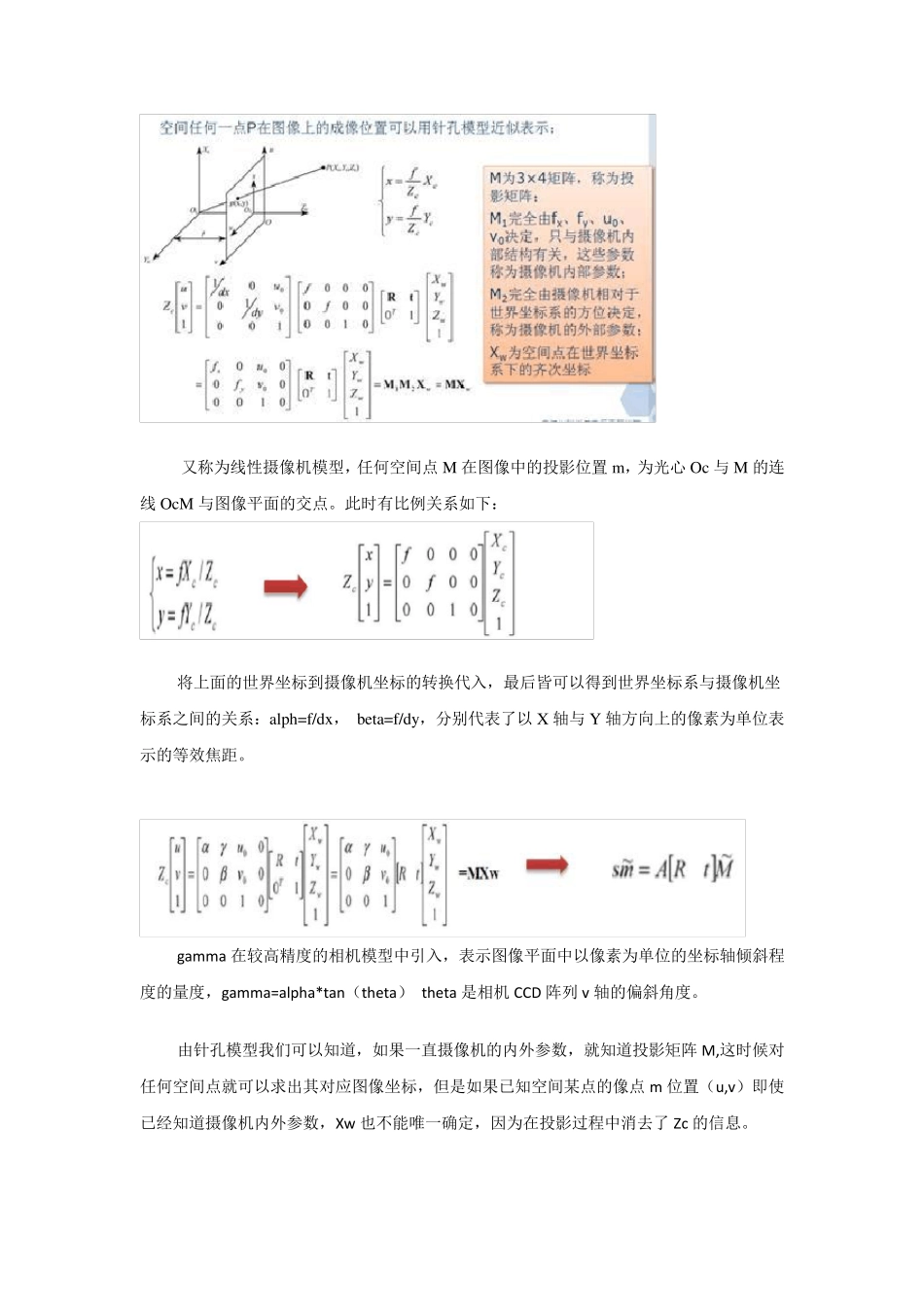
总体来说,世界坐标系到图像坐标系的关系可总结如下: 摄像头成像几何关系,其中Oc 点称为摄像头(透镜)的光心,Xc 轴和 Yc 轴与图像的x 轴和 Y 轴平行,Zc 轴为摄像头的光轴,它与图像平面垂直
光轴与图像平面的交点 O1 ,即为图像坐标系的原点
由点 Oc 与 Xc 、Yc 、Zc 轴组成的坐标系称为摄像头坐标系,Oc O1 的距离为摄像头焦距,用f 表示
又称为线性摄像机