产生的结果如下: 机械臂自由度减少,从而无法实现某些运动 某些关节角速度趋向于无穷大,导致失控 无法求逆运算 当机器人以笛卡尔坐标系运动时,经过奇点,某些轴的速度会突然变得很快,TCP点的路径速度会显著减慢
因此,应避免机器人的轨迹经过奇点附近
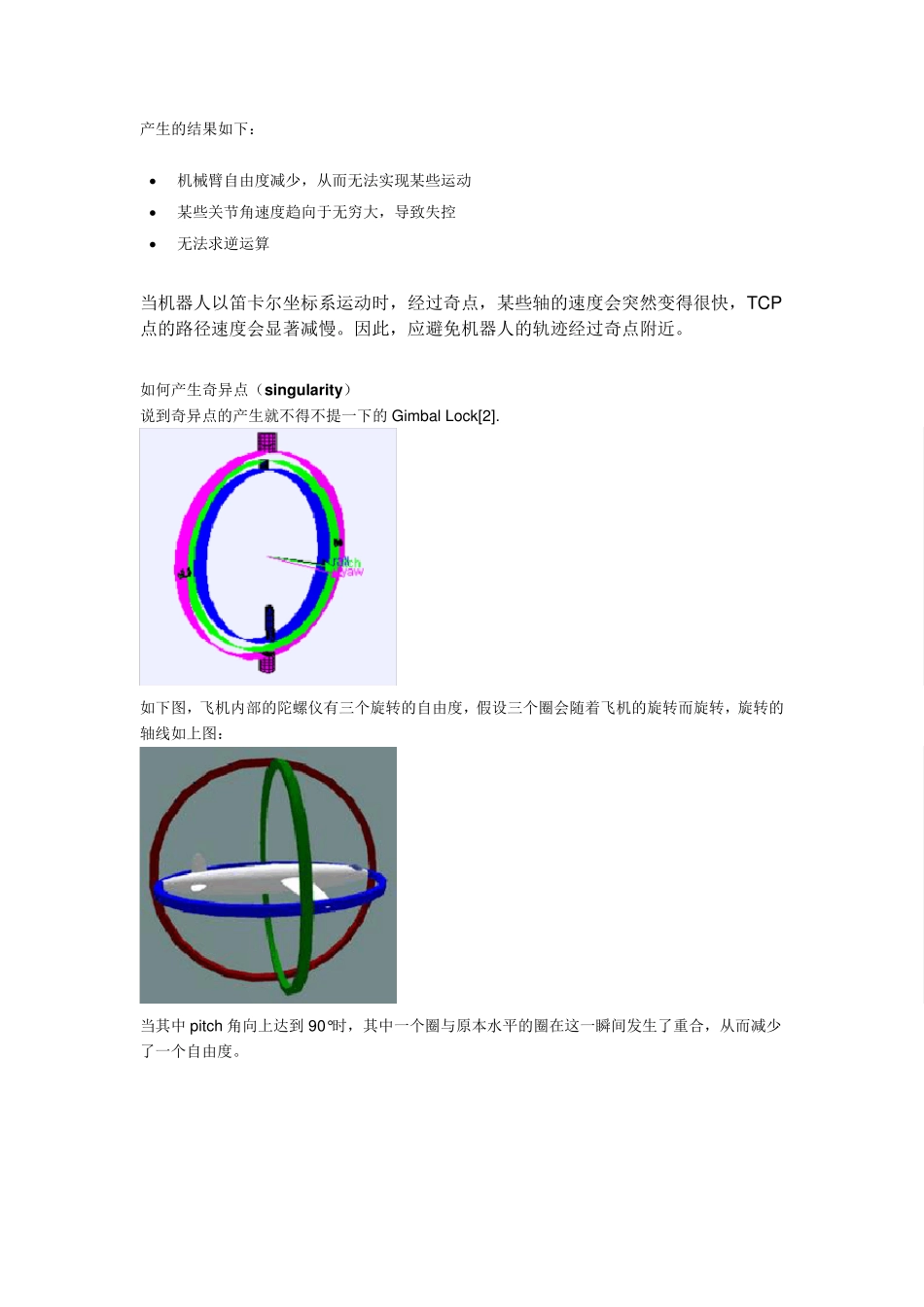
如何产生奇异点(singularity) 说到奇异点的产生就不得不提一下的Gimbal Lock[2]
如下图,飞机内部的陀螺仪有三个旋转的自由度,假设三个圈会随着飞机的旋转而旋转,旋转的轴线如上图: 当其中 pitch 角向上达到 90°时,其中一个圈与原本水平的圈在这一瞬间发生了重合,从而减少了一个自由度
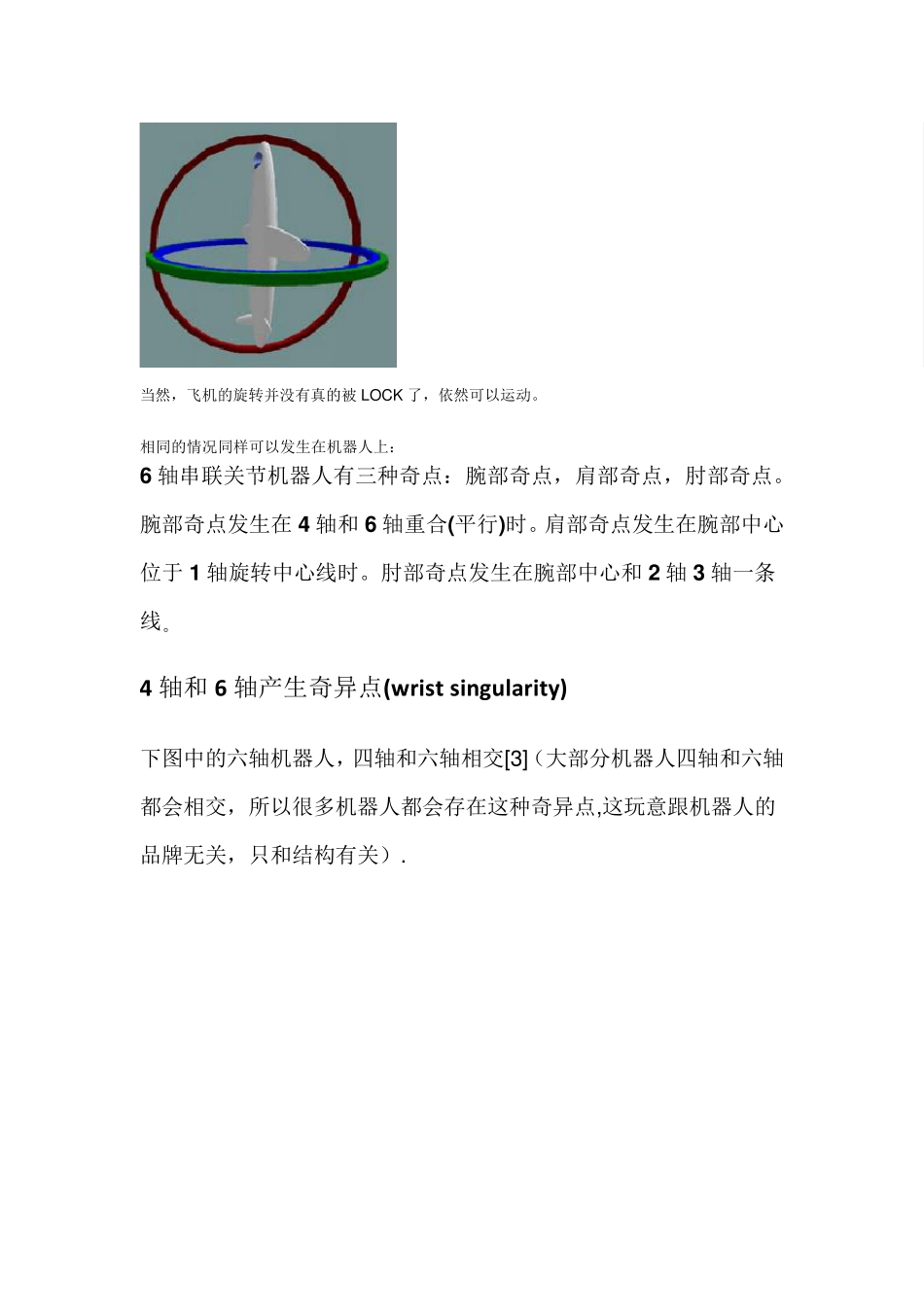
当然,飞机的旋转并没有真的被LOCK 了,依然可以运动
相同的情况同样可以发生在机器人上: 6 轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点
腕部奇点发生在 4 轴和 6 轴重合(平行)时
肩部奇点发生在腕部中心位于 1 轴旋转中心线时
肘部奇点发生在腕部中心和 2 轴 3 轴一条线
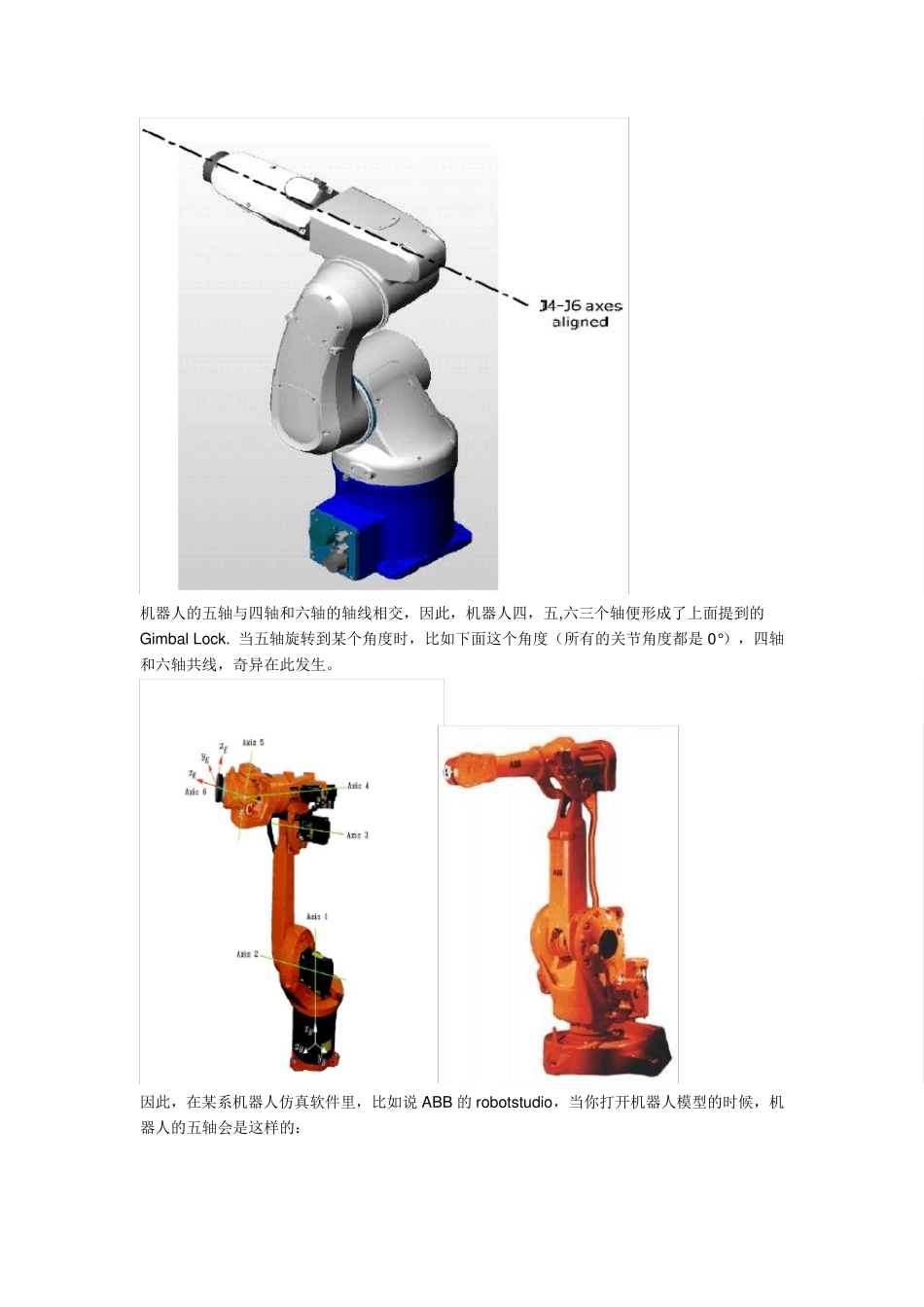
4 轴和 6 轴产生奇异点(wrist singularity) 下图中的六轴机器人,四轴和六轴相交[3](大部分机器人四轴和六轴都会相交,所以很多机器人都会存在这种奇异点,这玩意跟机器人的品牌无关,只和结构有关)
机器人的五轴与四轴和六轴的轴线相交,因此,机器人四,五,六三个轴便形成了上面提到的Gimbal Lock
当五轴旋转到某个角度时,比如下面这个角度(所有的关节角度都是0°),四轴和六轴共线,奇异在此发生
因此,在某系机器人仿真软件里,比如说 ABB 的robotstudio,当你打开机器人模型的时候,机器人的五轴会是这样的: 耷拉着小脑袋真不是为了卖萌,而是为了避开奇异点
除了这种奇异点,还有其他两种: 二、 1 轴和 6 轴奇异点(Alignment singularity) 三、当机器人的